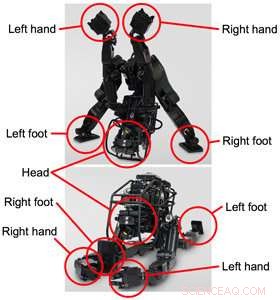
HRP-5P utseende (vänster) och HRP-5P med en ca. 13 kg bräda (höger). Kredit:Advanced Industrial Science and Technology
Forskare har utvecklat en humanoid robotprototyp, HRP-5P, avsedda att självständigt utföra tungt arbete eller arbete i farliga miljöer.
Som en 182 cm, 101 kg humanoid robot, HRP-5P byggdes på HRP-seriens teknologier genom att införliva ny hårdvaruteknik. Inom serien, den har oöverträffade fysiska förmågor. Dess robotintelligens omfattar miljömätning och objektigenkänning, hela kroppens rörelseplanering och kontroll, uppgiftsbeskrivning och utförandehantering, och mycket pålitlig systemiseringsteknik. Att inhysa intelligensen i denna kropp har möjliggjort autonom gipsskivainstallation av roboten, vilket är ett typiskt exempel på tungt arbete på byggarbetsplatser. Användningen av HRP-5P, som en utvecklingsplattform, i samarbete mellan industri och akademi lovar att påskynda forskning och utveckling mot praktisk tillämpning av humanoida robotar på byggarbetsplatser och vid montering av stora strukturer som flygplan och fartyg.
Figur 1. Böjning framåt (överst) och med benen spridda framåt och bakåt (nederst). Kredit:Advanced Industrial Science and Technology
Det sjunkande födelsetalet i Japan förväntas orsaka allvarlig brist på arbetskraft inom byggbranschen och många andra industrier. Det är absolut nödvändigt att lösa detta problem med hjälp av robotteknik. Dessa tekniker ger också ett övertygande alternativ till att ha byggnadsarbetare på byggarbetsplatser, flygplansanläggningar, eller varv utför tungt arbete som är potentiellt farligt. Dock, det har varit svårt att göra dessa storskaliga byggarbetsplatser lämpliga för robotar, vilket har avskräckt introduktion av robotar. Eftersom humanoida robotar fysiskt liknar människor, de kan arbeta utan att kräva miljöförändringar, möjligen befria arbetare från tungt arbete.
I utvecklingen av HRP-serien, AIST har samarbetat med flera privata företag, inklusive Kawada Industries Inc. (nu Kawada Robotics Corp.), och har utvecklat grundläggande teknologier för praktisk tillämpning. HRP-2 kunde gå på två ben, ligger ner, står upp, gå på smala stigar, och andra åtgärder. HRP-3 kunde gå på hala underlag och dra åt bultar på broar med fjärrkontroll. Katastrofrespons humanoid robotforskning som pågår vid AIST sedan 2011 ledde till en reviderad version av HRP-2 med förbättrade fysiska förmågor (som lemlängd, rörelseomfång, och gemensam produktion), som kunde gå i ojämn terräng, vrid ventiler, och utföra andra uppgifter semi-autonomt baserat på 3-D miljömätning. Dock, dess fysiska kapacitet var fortfarande otillräcklig för tungt arbete såsom installation av gipsskivor, och det saknade tillräcklig grad av frihet och tillräckligt rörligt utbud av leder för att efterlikna mänsklig rörelse i komplexa miljöer. Mot detta mål, AIST fortsatte utvecklingen av den humanoida roboten, HRP-5P, med fysiska förmågor som gör det möjligt att ersätta människor som utför tungt arbete.
Vidare, HRP-5P ärver teknologierna i HRP-serien och använder patenterad teknologi från Honda Motor Co., Ltd.
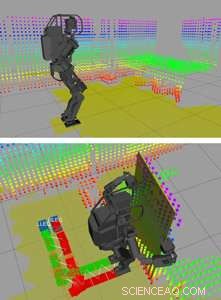
Figur 2. Karta över omgivningen (överst) och promenadplan (nederst). Kredit:Advanced Industrial Science and Technology
En del av utvecklingen av HRP-5P stöddes av FoU på uppdrag av New Energy and Industrial Technology Development Organization (NEDO), "FoU på mycket pålitliga humanoida robotsystem som kan arbeta i ostrukturerade miljöer" i "autonoma humanoida robotar (innovativt element robotteknologisområde)" av "FoU om nästa generations kärnrobotteknologier, "och bidrag för vetenskaplig forskning från Japan Society for the Promotion of Science, "Inriktning på rörelseplanering för hela kroppen baserad på förvärv av miljömodeller som gör det möjligt för mänskliga robotar att anpassa sig till okända miljöer" (forskningsprojektnummer JP17H07391).
Den humanoida robotprototypen HRP-5P utvecklades med en robust kropp och avancerad intelligens för att arbeta självständigt och tillhandahålla en alternativ källa till tungt arbete.
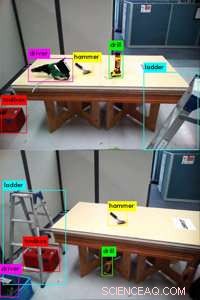
Figur 3. Exempel på objektdetektering. Kredit:Advanced Industrial Science and Technology
Integration of these technologies has enabled autonomous gypsum board installation in which HRP-5P handles and carries large, heavy objects at a simulated residential construction site independently.
Specifikt, this work involves the following series of operations.
R&D on robot intelligence will be promoted using this platform, targeting an alternative source of autonomous manual labor at residential or office building sites, and in assembly of large structures such as aircraft and ships. This will compensate for labor shortages, free people from heavy labor, and help them focus on more high-value-added work.
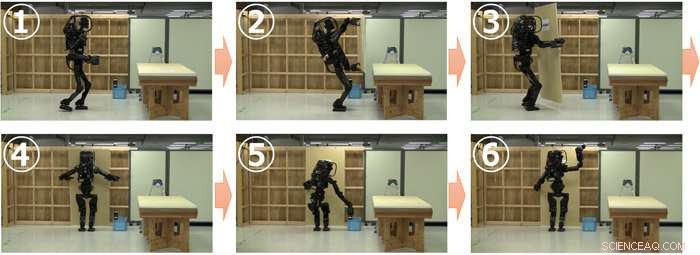
Figure 4. Autonomous gypsum board installation by HRP-5P. Credit:Advanced Industrial Science and Technology