Stanford-forskare utvecklade den hudliknande sensorn på fingertoppen av denna robothand, och programmerade den att röra frukten utan att skada den. En dag hoppas de kunna skapa styrsystem som gör det möjligt för en robot att uppfatta föremålens egenskaper och självständigt beräkna hur mycket kraft som ska appliceras. Kredit:Bao Lab
Stanfords ingenjörer har utvecklat en elektronisk handske som innehåller sensorer som en dag kan ge robotiska händer den typ av fingerfärdighet som människor tar för givet.
I ett papper publicerat 21 november i Science Robotics , kemiingenjören Zhenan Bao och hennes team visade att sensorerna fungerar tillräckligt bra för att en robothand ska kunna röra ett känsligt bär och hantera en pingpongboll utan att klämma dem.
"Denna teknik ger oss en väg att en dag ge robotar den typ av avkänningsmöjligheter som finns i människans hud, "Sa Bao.
Bao sa att sensorerna i handskens fingertoppar mäter samtidigt intensiteten och riktningen av tryck, två egenskaper som är viktiga för att uppnå manuell fingerfärdighet. Forskarna måste fortfarande förbättra tekniken för att automatiskt styra dessa sensorer, men när de gör det en robot som bär handsken kan ha fingerfärdighet att hålla ett ägg mellan tummen och pekfingret utan att krossa det eller låta det glida.
Elektronik som imiterar livet
Den elektroniska handsken imiterar hur lager av mänsklig hud fungerar tillsammans för att ge våra händer deras extraordinära känslighet.
Vårt yttre hudlager är genomsyrat av sensorer för att detektera tryck, värme och andra stimuli. Våra fingrar och handflator är särskilt rika på beröringssensorer. Dessa sensorer fungerar tillsammans med ett underlag av hud som kallas spinosum, en ojämn mikroskopisk terräng med kullar och dalar.
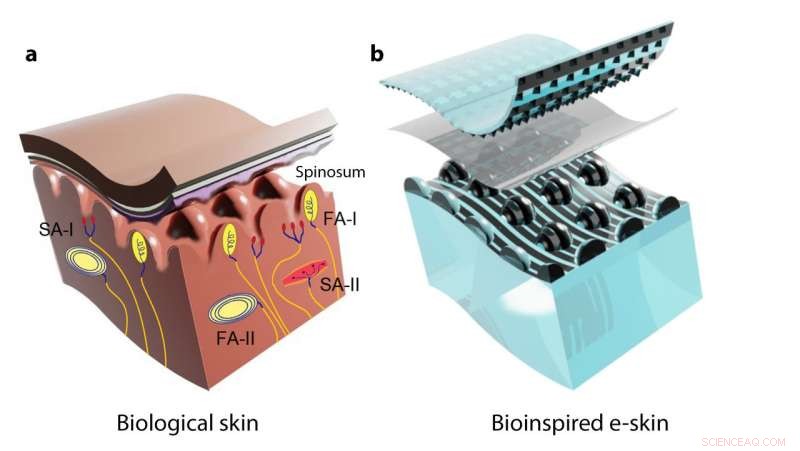
Ett tvärsnitt av mänsklig hud från fingertoppen som visar viktiga sensoriska strukturer (vänster). Denna struktur tjänade som inspiration för utformningen av e-skin (höger). Upphovsman:Boutry et al., Sci. Robot . 3, eaau6914 (2018)
Den ojämnheten är kritisk. När vårt finger rör vid ett föremål, det yttre hudlagret rör sig närmare spinosum. En lätt beröring känns främst av sensorer nära kullarna. Mer intensivt tryck tvingar den yttre huden ner i spinosums dalar, utlöser mer intensiva beröringsförnimmelser.
Men mätning av tryckets intensitet är bara en del av vad spinosum möjliggör. Detta ojämna underlag hjälper också till att avslöja tryckriktningen, eller skjuvkraft. Ett finger som trycker norrut till exempel, skapar starka signaler på de södra sluttningarna av de mikroskopiska kullarna. Denna förmåga att känna av skjuvkraft är en del av det som hjälper oss att försiktigt men fast hålla ett ägg mellan tummen och pekfingret.
Postdoktor Clementine Boutry och masterstudent Marc Negre ledde utvecklingen av de elektroniska sensorerna som efterliknar denna mänskliga mekanism. Varje sensor på fingertoppen på robothandsken är gjord av tre flexibla lager som fungerar tillsammans. Övre och nedre skikten är elektriskt aktiva. Forskarna lade ett nät av elektriska ledningar på var och en av de två motstående ytorna, som rader i ett fält, och vände dessa rader vinkelrätt mot varandra för att skapa en tät uppsättning små avkännande pixlar. De gjorde också det nedre lagret ojämnt som spinosum.
Gummiisolatorn i mitten höll helt enkelt de övre och nedre lagren av elektroder isär. Men den separationen var kritisk, eftersom elektroder som är nära utan att vidröra kan lagra elektrisk energi. När robotfingret tryckte ner, klämma de övre elektroderna närmare botten, den lagrade energin ökade. Kullarna och dalarna i bottenlagret gav ett sätt att kartlägga tryckets intensitet och riktning till specifika punkter på de vinkelräta gallren, ungefär som mänsklig hud.
Delikat beröring
För att testa sin teknik placerade forskarna sina treskiktade sensorer på fingrarna på en gummihandske, och lägg handsken på en robothand. Så småningom är målet att bädda in sensorer direkt i ett hudliknande skydd för robothänder. I ett experiment, de programmerade den handskbärande robothanden för att försiktigt vidröra ett bär utan att skada det. De programmerade också den handskade handen för att lyfta och flytta en pingisboll utan att krossa den, genom att använda sensorn för att upptäcka lämplig skjuvkraft för att greppa bollen utan att tappa den.
Bao sa att med rätt programmering kan en robothand som bär den aktuella beröringsavkännande handsken utföra en repetitiv uppgift som att lyfta ägg från ett transportband och placera dem i kartonger. Tekniken kan också ha tillämpningar inom robotassisterad kirurgi, där exakt beröringskontroll är avgörande. Men Baos yttersta mål är att utveckla en avancerad version av handsken som automatiskt tillämpar precis rätt kraft för att hantera ett objekt säkert utan föregående programmering.
"Vi kan programmera en robothand för att röra ett hallon utan att krossa det, men vi är långt ifrån att kunna röra och upptäcka att det är hallon och göra det möjligt för roboten att plocka upp det, " Hon sa.