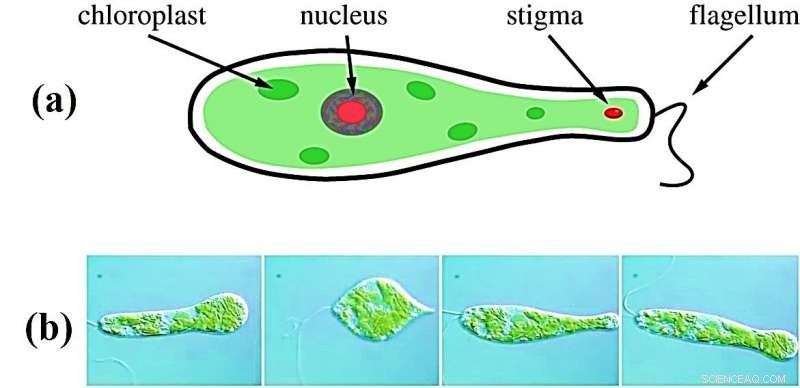
a) Schematisk illustration av en euglenoid organism som visar olika cellulära organismer inklusive en flagellum. Bild anpassad från:IEE Robot. Autom. Låt., doi:10.1109/LRA.2017.2726113, b) Sekvens av bilder från rörelsen av Eutreptiella spirogyra under euglenoidrörelse. Bilder som återges med tillstånd från, Richard E. Triemer, Euglenoid -projektet. Upphovsman:RSIF, doi:10.1098/rsif.2018.0301
Simning är en form av rörelse som används av många organismer över ett stort antal skalor i naturen. Mikroorganismer med liten massa som möter dominans av viskösa krafter i mediet kräver en formändring som inte varierar med tiden för att uppnå fluidisk framdrivning i linje med hydrodynamik. För att övervinna denna utmaning, encelliga flagellater av Euglena -familjen utvecklade en karakteristisk rörelse som kallas 'euglenoidrörelse' där kroppen avsevärt ändrar form, låta organismen navigera genom viskösa vätskor och små utrymmen. Denna förmåga att ändra kroppsform och röra sig genom trånga utrymmen och röriga miljöer är särskilt attraktiv i konstruktion av biomimetiska robotar. Exempel på tillämpningar av miniatyrrobotar inkluderar rörelse genom biologiska vätskor under medicinska ingrepp in vivo och navigering genom spillror i yttre miljöer under sök- och räddningsoperationer av överlevande.
Inspirerad av euglenoider, Krishna Manaswi Digumarti och medarbetare vid Institutionen för teknik och matematik presenterade design och utveckling av EuMoBot, en flersegmenterad mjuk robot. Den biomimetiska roboten kan replikera stora kroppsdeformationer för rörelse. I studien, forskarna konstruerade två robotar i olika storlekar för att arbeta med en konstant intern volym. Teknikprotokollet använde hyperelasticiteten hos vätskefyllda elastomera kammare för att replikera rörelsen av euglenoider. Av de två, den mindre roboten rörde sig med en hastighet av 1/5 kroppslängder per cykel, medan den större roboten rörde sig med en hastighet av 1/10 kroppslängder per cykel. Studien visade hur mjuka biomimetiska robotar kan användas för att ändra form och replikera biologisk rörelse, samtidigt som det fungerar som ett verktyg för att studera biomimetiska robotar.
Forskarna presenterade också en kvantitativ metod baserad på elliptiska Fourier -deskriptorer för att karakterisera och jämföra robotens form med dess biologiska euglenoida motsvarighet. Resultaten visade 85 procent likhet i form, vilket indikerar att ingenjörstekniken var tillämplig för att utveckla miniatyrrobotar. Metoden tillät forskarna att förstå utvecklingen av form i olinjär, dynamiska mjuka robotar som inte hade en specifik form att modellera efter. Resultaten av studien publiceras nu i Journal of the Royal Society Interface .
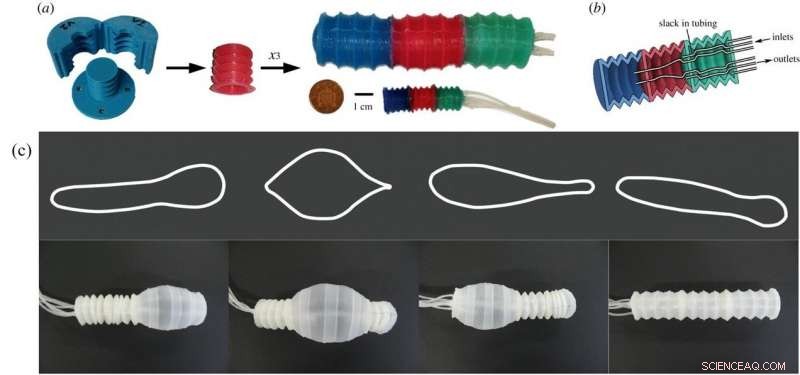
Tillverkning av den flersegmenta mjuka roboten genom att sammanfoga tre HEB-ställdon. a) Tredimensionell tryckt form med två halvor och en kärna som används för att gjuta silikonelastomeren. Mitten:en enda ställdonskammare. Till höger:en tresegmentsrobot tillverkad i två olika skalor. En engelsk krona som visas i skala. b) Tvärsnittsvy av roboten som visar olika kamrar. Varje kammare försågs med ett inlopps- och utloppsrör. Tillräcklig slack tillhandahålls för att möjliggöra fri expansion av kamrarna. c) Topp:kontur av cellformer under euglenoidrörelse. Botten:den tillverkade mjuka roboten som replikerar den bioinspirerade euglenoidformen. Upphovsman:RSIF, doi:10.1098/rsif.2018.0301.
Biomimetiska tekniska strategier har inspirerat forskare att söka design från djurriket och skapa biologiskt inspirerade robotar. Euglenoider är encelliga flagellater, studerade omfattande i laboratoriet som modeller på grund av deras växtliknande och djurliknande karaktär. Organismerna använder unika strategier för att simma med låga Reynolds -tal och studier om deras rörelse är relativt nya. Organismens celler är vanligtvis utrustade med en eller flera flageller för att simma, samtidigt som den uppvisar en andra typ av långsammare rörelse som kallas euglenoidrörelse, där cellen genomgår en dramatisk formförändring. I föreliggande studie, Digumarti et al. använde den andra formen av rörelse för att konstruera en mjuk, funktionell robot baserad på mikroorganismens beteende.
Den evolutionära orsaken till den observerade formförändringen under euglenoidrörelsen är okänd, även om man tror att deformation i cellstorlek uppstod som svar på starka stimuli som ljus, värme, kemisk chock eller kontakt. När mikroorganismerna placerades i en vätskefylld mikroskopisk labyrint som liknade sin naturliga miljö, många visade euglenoidrörelse, tyder på att rörelsen var väl lämpad för begränsade miljöer. Rörelse av denna karaktär kan vara användbar för en bioinspirerad robot inom mjuk robotik att ta sig igenom röriga miljöer med stora kroppsdeformationer.
I studien, författarna presenterade designen, aktiveringsprincip och tillverkningsmetod för att konstruera EuMoBot, en mjuk robot som visar euglenoidrörelse. Rörelse genom en vätska kvantifierades i förhållande till den naturliga mikroorganismens rörelse. Eftersom de bakomliggande mekanismerna för formförändring tidigare har studerats i detalj, Digumarti et al. fokuserade på euglenoidens makroskopiska form i robotform utan att replikera förändringar på mikroskopisk nivå. För att generera mjuka fluidiska ställdon, forskarna designade en ny bälgliknande enhet som kallas 'hyperelastisk bälg' (HEB) ställdon som tidigare beskrivits av samma forskargrupp.

a) Att visa robotens överensstämmelse när den expanderar mellan styva skruvar. b) Sekvens av bilder i början och slutet av en rörelsecykel på ett plant bord. c) Robot klättrar inuti ett rör med hjälp av en tum-mask-gångart. Upphovsman:RSIF, doi:10.1098/rsif.2018.0301.
Ingenjörerna bildade formen på ställdonet med hjälp av en 3D-tryckt form. De tillverkade två robotar i olika storlekar. De gjuter tre ställdonskammare, följt av elastomer blandat med pigment injicerade i formen för att härda över natten och bilda ett genomskinligt vitt hölje. Den bioinspirerade mjuka roboten innehöll en uppblåsnings-/tömningskammare för att replikera euglenoidformen och uppnå likhet i rörelse.
För att testa rörelse för de konstruerade robotarna, forskarna placerade dem i en tank fylld med en lösning av metylcellulosa i vatten. Robotarna i varje experiment hade en konstant inre volym, och deras inre vätska flyttade från en kammare till nästa, återge rörelsen hos en expansionsvåg som är karakteristisk för euglenoider. Båda robotarna visade förmåga att simma genom att ändra kroppens form. Skillnaden i hastighet berodde på volymen vätska som pumpades genom den mjuka robotens kamrar. Forskarna observerade den hydrodynamiska likheten mellan den mjuka roboten och mikroorganismen i förhållande till Reynold -siffror i båda storlekar. Den mjuka roboten var inte bara begränsad till att arbeta i en flytande miljö som dess biologiska motsvarighet, med kapacitet för multimodal rörelse på ett plant bord och klättring i ett rör med icke-konstant driftvolym.
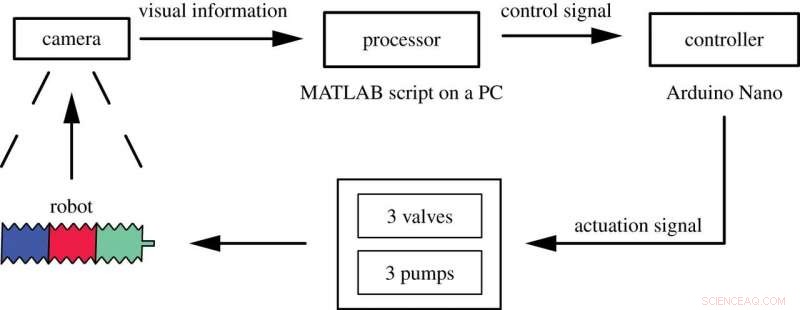
Schematisk bild av kontrollarkitekturen för den mjuka roboten. En kamera används för att bestämma robotens nuvarande tillstånd. Ett MATLAB -skript behandlar denna information för att bestämma robotens nuvarande tillstånd, som inkluderar expansion och kontraktion av varje kammare. Den passerar sedan genom lämpliga styrsignaler till en Arduino, som styr driften av pumpar och ventiler för att styra vätskeflödet inuti roboten. Upphovsman:RSIF, doi:10.1098/rsif.2018.0301.
Roboten använder ett feedbackbaserat tillvägagångssätt för autonom kontroll, ta bort behovet av att modellera pumpens dynamik och vätskeflöde i roboten. En uppskattning av maskinsyn av kammarstorlek via en kamera och MATLAB-skript gav feedback. Systemet använde expansion och sammandragning av varje kammare för att styra vätskeflödet inuti roboten. Sensorer i roboten tillät direkta mätningar av vätsketrycket.
Formuppskattning av roboten utfördes med matematiska deskriptorer extraherade med tidigare videoinspelningar av organismen. Forskarna använde den elliptiska Fourier-deskriptorn för slutna konturer för att beskriva formen på en hyperelastisk mjuk robot och jämförde den med en biologisk organism för första gången i studien. Den elliptiska Fourier -deskriptorn extraherades i fyra huvudsteg för att uppskatta objektets form. Mängden varians i formen fångad av en egenvektor användes för att kvantitativt mäta likheten i form mellan roboten och organismen. Euglenoidernas form kännetecknades tydligt av de tre första huvudkomponenterna, medan variansen i robotarna spreds över fler komponenter, vilket tyder på att de extrema formerna av euglenoider inte reproducerades fullt ut i robotarna.
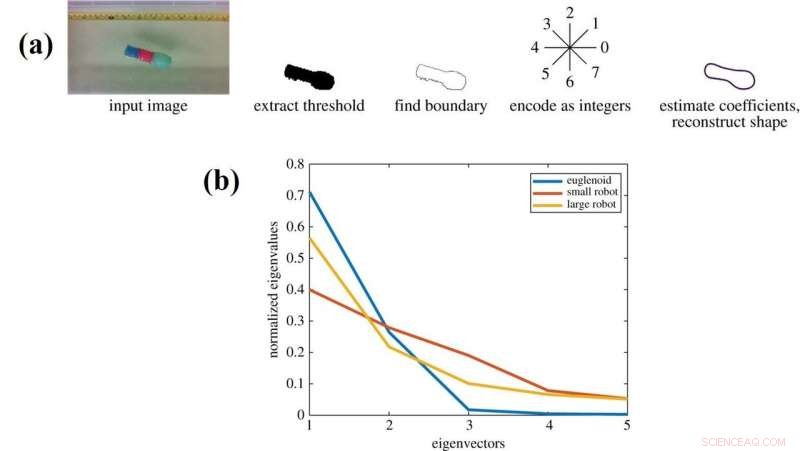
a) Formestimeringens fyra steg. Först extraheras området av intresse från bilden. Nästa, gränsen identifieras. Denna kontur kodas sedan som en uppsättning Freeman -heltal. Till sist, en uppsättning Fourier -koefficienter beräknas, och form rekonstrueras. b) Normaliserade egenvärden för de första fem egenvektorerna som beskriver formen på de mjuka robotarna jämfört med euglenoiden. Upphovsman:RSIF, doi:10.1098/rsif.2018.0301.
Baserat på egenvärden, de större robotarna reproducerade former närmare euglenoiden jämfört med de mindre robotarna. Orsaken till den observerade skillnaden kan bero på utformningen av bälgens veck (Hyperelastiska bälgar — HEB). Parametrar för vikningsvinklarna, deras antal och densitet kan optimeras ytterligare för att uppnå bättre formreplikation. Jämfört med naturliga mikroorganismer, roboten gav inte ett smidigt skift vid överföring av vätska från en kammare till en annan, potentiellt eftersom den syntetiska gränsväggen trots dess elasticitet lokalt kan begränsa kammarens expansion. Detta kan också förklara robotens oförmåga att anta extrema former.
Som helhet, den multisegmenta mjuka roboten EuMoBot kan replikera euglenoidrörelse utöver simning med formförändring och rörelse i icke-flytande miljöer, så att den mjuka och tillfredsställande roboten kan arbeta i trånga utrymmen. Ytterligare arbete krävs för att förstå förhållandet mellan huvudkomponenter och rörelseförmåga. Extremiteten av former som uppvisas av EuMoBots var begränsad på grund av draghållfastheten hos tillhörande material och dess monolitiska anordningsdesign. Alternativa tillverkningstekniker som 3D-tryckning och mjuk litografi kan hantera gränserna för materialelasticitet. Robotarna kan också konstrueras för att likna euglenoider med matematisk noggrannhet genom att replikera den mikroskopiska pellikelstrukturen som är inneboende i organismen för en jämnare övergång under rörelse. Möjligheten att styra kan inkluderas i robotens design med manövrerade spolar av formminneslegering eller med hjälp av begränsningar på materialet med internaliserade kraftkällor för fjädrande, miniatyriserade enheter i framtida arbete.
© 2018 Science X Network