Kredit:Chand Gudi et al.
Forskare vid Innovation and Enterprise Research Laboratory (The Magic Lab) vid University of Technology Sydney har föreslagit en ny robotikarkitektur som kallas fog robotics (FR). Deras tillvägagångssätt, beskrivs i en tidning som förpublicerats på arXiv, utnyttjar styrkorna med dimdatorer, en decentraliserad datorstruktur där resurser och data placeras mellan sin källa och molnet.
Under de kommande åren, robotar kommer sannolikt att nå utbredd användning i en mängd olika miljöer, inklusive hem, sjukvårdsanläggningar, och flera branscher. Aktiv kommunikation är en nyckelfaktor bakom effektiv interaktion mellan människa och robot och forskare världen över försöker därför ta fram nya strategier som kan förbättra sättet på vilket robotar kommunicerar.
Molnrobotik (CR) tillåter robotar att utföra omfattande beräkningar i molnet genom att dela kartor, bilder, data, aktiviteter, processorkraft och andra resurser online. Dock, på grund av dess stora data- och trafikbehov, CR innebär allvarliga latensproblem, särskilt i interaktioner mellan robot och människa.
"Idén med dimrobotik kom att tänka på efter att ha sett en hög latens i en robots kommunikation, både i sina svar och i att nå sitt mål, "Siva Leela Krishna Chand Gudi, en av forskarna som genomförde studien, berättade för TechXplore. "Vi undrade vad som kan hända inom en snar framtid, när robotar kommer att tjäna överallt, eftersom denna fördröjning sannolikt kommer att öka. Genom att ärva funktionerna i dimdatorer och göra molnrobotik till vår följeslagare, vi introducerade och myntade termen dimrobotik, först på IROS 2017-konferensen."
Huvudsyftet med studien som utfördes av Gudi och hans kollegor var att leverera robusta, flytande och effektiva interaktioner mellan människa och robot med låg latens. Forskarna ville också tillåta robotar att kommunicera och samarbeta med människor samtidigt som de utför uppgifter, dela sina resultat eller aktiviteter inom samma familj av robotar. Detta skulle i slutändan förvandla robotar till partners som förstår behoven hos människor de interagerar med, svarar snabbt och effektivt.
Kredit:Chand Gudi et al.
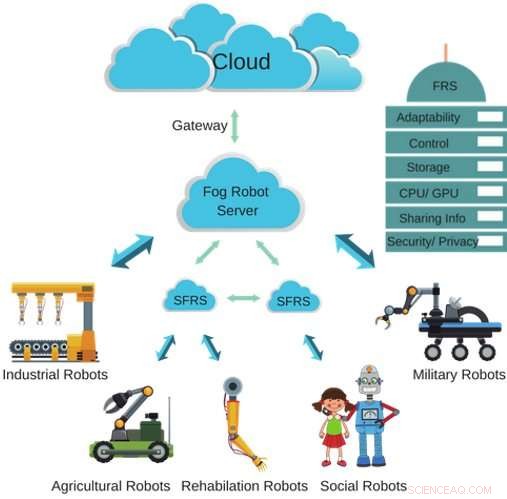
För att ta itu med problemen i samband med CR, forskarna föreslog och definierade en ny robotikarkitektur kallad fog robotics (FR), bestående av förvaring, nätverksfunktioner, och decentraliserad datoranvändning som är närmare robotar. FR har tre huvudkomponenter:sub fog-robotservern, dimrobotservern, och molnet.
En robot skickar en begäran om information till FR-systemet, inledningsvis begärde överlämningar till sub fog-robotservern. Om den här servern effektivt kan hantera begäran, den skickar den begärda informationen till roboten; om det inte kan, den söker hjälp från dimrobotservern. Om den här servern inte heller kan behandla begäran, den ber om hjälp från molnet, som vanligtvis löser förfrågan och skickar informationen till roboten.
Fördelarna med detta tillvägagångssätt inkluderar en snabb svarsfrekvens, låg latens, förbättrad datorkapacitet, lägre energiförbrukning, billigare hårdvara, och mindre säkerhets- eller integritetsproblem. Med andra ord, FR kan leda till robusta och snabbare interaktioner mellan människa och robot, samtidigt som robotens batteritid förbättras.
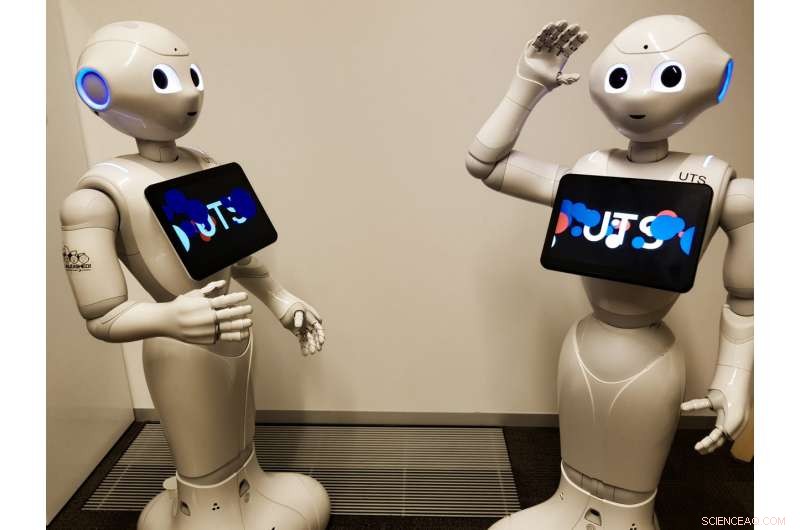
"Baserat på den genomsnittliga fördröjningen som tas emot av en social robotpeppar och en uppsättning av FRS/moln, vi betraktade ett värde av latens, ", sa Gudi. "Vi undersökte senare våra nuvarande metoder på en simuleringsplattform, utvärdera deras potentiella effekter när antalet robotar ökar. Vi bevisade att FR ger låg latens och kan spela en viktig roll i framtiden, blir ett tillägg till CR."
I en serie inledande utvärderingar, FR uppnådde mycket snabbare svarsfrekvens än CR-metoder. Forskarna tror att det skulle kunna användas oberoende eller integrerat med CR, minska belastningen på molnet och förbättra tjänstekvaliteten (QoS).
Kredit:Chand Gudi et al.
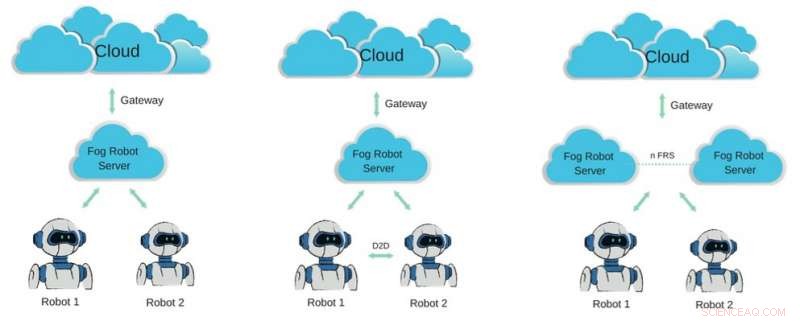
"Vi människor söker hjälp från andra närhelst vi är i behov av information, men robotar är begränsade till de uppgifter de är förprogrammerade för, Gudi förklarade. "FR tillåter också en robot att dela sin data med en annan robot."
För att bättre förklara denna punkt, Gudi gav ett exempel på hur flera robotar kan hjälpa människor på en flygplats. I det scenario som han beskrev, en resenär skulle fråga en robot var hans/hennes avgångsport finns. Roboten skulle guida resenären till rulltrappan och sedan lämna över uppgiften till en andra robot, som skulle vänta i andra änden av rulltrappan.
Att känna igen honom/henne när de närmar sig andra änden av rulltrappan, denna andra robot skulle kräva information om personens namn, identitet, kön och hur de ser ut. I den här situationen, FR skulle tillåta dessa två robotar att samarbeta i uppgiften och kommunicera med varandra, snabbt utbyta information som behövs för att slutföra uppgiften.
"Liknande, FR-tekniker skulle kunna tillämpas på universitet, tunnelbanor, industrirobotar, och listan fortsätter, nå olika områden inom robotik, " sa Gudi. "I slutändan, FR leder till robust människa-robotinteraktion med låg latens, samtidigt som man säkrar personuppgifter genom att spara dem i dimrobotservern."
Forskarna har genomfört ett antal ytterligare analyser, bl. som de snart kommer att publicera på nätet. De planerar också att testa effektiviteten av FR på RoboCup i Sydney, där flera robotar kommer att tävla i det vilda.
© 2018 Science X Network