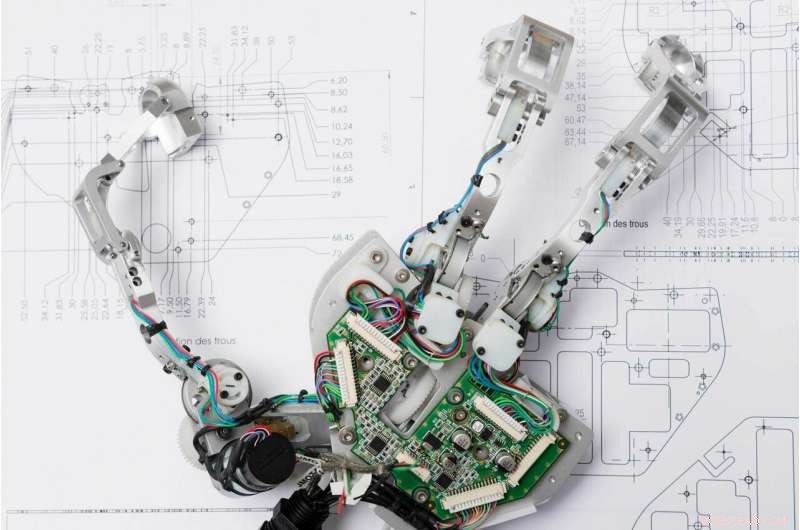
Robotar spelar en roll i hjälparbete efter katastrofer i situationer som är för farliga för människor. Kredit:Centauro
Robust, intelligenta robotar som reagerar på sin omgivning utvecklas för att fungera i situationer som är för farliga för människor, som att städa upp Europas decennier gamla radioaktiva avfall eller hjälpa till under en kärnkraftsnödsituation.
När Japans kärnkraftskatastrof i Fukushima inträffade 2011 efter en förödande jordbävning och tsunami, robotarna som sattes in för att stödja räddningsarbetare var väldigt grundläggande och till stor del ineffektiva, säger robotexperten professor Sven Behnke vid universitetet i Bonn i Tyskland.
sporrad av detta problem, Prof. Behnke och hans team utvecklade ett robust katastrofberedskapssystem genom ett projekt kallat CENTAURO. Roboten styrs av en människa på säkert avstånd medan olika sensorer gör att den kan uppfatta sin omgivning och vidarebefordra information tillbaka till sin operatör.
"Huvudoperatören styr roboten genom en telepresence-dräkt som mäter rörelserna för operatörens armar, handleder och fingrar och överför dem till roboten, " sa projektkoordinatorn Prof. Behnke. En huvudmonterad display som bärs av operatören låter dem se i 3D vad roboten ser från sitt eget perspektiv, han lägger till.
heter Centauro, den 1,5 meter höga roboten väger 93 kilo, är gjord av lättviktsmetaller som aluminium och har 3-D-tryckt plastskal.

Telemanövrerad robot Centauro kan utföra uppgifter som att gå i trappor, navigera hinder och använda elverktyg. Kredit:Centauro
Kentaurliknande
"Roboten har en kentaurliknande kroppsplan med fyra ledade ben som slutar i styrbara hjul, " sa Prof. Behnke. De fyra benen gör den stabilare än tvåbenta robotar. Eftersom den kan rotera vid höften, knä och fotled, Centauro kan anta många ställningar och navigera i utmanande miljöer.
Centauros överkropp har två armar med flerfingrade händer som gör att den kan lyfta föremål och manipulera verktyg och dörrar. Även om den är teleopererad, roboten har en viss grad av autonomi. Till exempel, om den blir tillsagd att flytta till specifika platser eller ta tag i ett föremål kommer den att planera och utföra åtgärden.
Förra året, Centauro testades i verkligheten, utmanande scenarier hos den tyska leverantören av kärnkraftskatastrofer Kerntechnische Hilfsdienst GmbH. Den gick framgångsrikt i trappor, navigerade skräp, övervann luckor, låste upp en dörr, manövrerade ventiler och elverktyg, och mer, säger prof. Behnke. "CENTAURO katastrofberedskapssystemet gav den höga grad av flexibilitet som behövs för realistiska uppdrag, " han sa.
Prof. Behnke hoppas att tekniken en dag kan spela en avgörande roll i katastrofhjälp, även om den inte är redo att möta strålning ännu. Dock, forskare vid University of Birmingham, STORBRITANNIEN, håller på att utveckla robotar som kan hantera höga strålningsnivåer för att sanera kärnavfall från det senaste halvseklet.

Under 2013, det senaste året för vilket siffror finns tillgängliga, Frankrike hade det mest radioaktiva avfallet i EU med nästan 1,5 miljoner kubikmeter, 44% av blockets totala. Storbritannien hade den näst största mängden med mer än 1,2 miljoner kubikmeter, 38 % av den totala EU-volymen. Kredit:2013, det senaste året för vilket siffror finns tillgängliga, Frankrike hade det mest radioaktiva avfallet i EU med nästan 1,5 miljoner kubikmeter, 44% av blockets totala. Storbritannien hade den näst största mängden med mer än 1,2 miljoner kubikmeter, 38 % av den totala EU-volymen. Kredit:Horizon:The EU Research &Innovation Magazine
Över hela Europeiska unionen, mer än 90 kärnreaktorer har stängts permanent medan fler anläggningar kommer att avvecklas. Under sin budget för 2021-2027, Europeiska kommissionen har föreslagit att anslå nästan 1,2 miljarder euro till kärnsäkerhet.
"Det finns nästan fem miljoner ton äldre kärnavfall i Storbritannien och att städa upp det är den största och svåraste utmaningen för miljösanering i hela Europa, säger robotexperten professor Rustam Stolkin som koordinerar RoMaNs-projektet.
Professor Stolkin och hans kollegor designar autonoma beteenden hos robotar så att de kan sortera radioaktivt avfall efter olika föroreningsnivåer.
"Detta kan bara göras av robotar eftersom detta avfall är för radioaktivt för människor att komma nära, även (när) bär skyddsdräkter, sade prof Stolkin.
Exoskelettet med tre fingrar som utvecklats av CEA fångar operatörens rörelser för att styra slavrobotens hand. Kredit:CEA / Stroppa
AI-styrd
Hittills, robotar som arbetar i farliga miljöer styrs helt av en människa, men denna enkelriktade strategi skulle vara mödosamt långsam för att greppa och flytta enorma mängder material med oförutsägbara former, storlekar och konsistenser, säger prof Stolkin.
För att övervinna detta problem, teamet utvecklade en autonom, vision-guided robot som använder AI för att hjälpa den mänskliga operatören.
Deras projektpartner CEA, den franska kommissionen för alternativ energi och atomenergi, skapade en kärnkraftssäker robotarm med en hand och fingrar, som styrs av en robothandske, eller haptiskt exoskelett, bärs av operatören.
"Det här är lite som en fancy joystick, " förklarade professor Stolkin. "Så när du rör din arm och dina fingrar, slavarmen i den radioaktiva zonen rör sin arm och sina fingrar."
Systemet använder AI för automatisk syn, låter roboten veta hur man upptäcker, känna igen och plocka upp alla typer av föremål.
De mänskliga operatörerna delar kontrollen över robotarmen med roboten genom teleoperation och AI, säger prof Stolkin. Till exempel, operatören kan flytta runt armen och roboten styr automatiskt handens orientering för att göra greppet lättare, eller roboten, planerar att greppa ett föremål, skulle visa sina avsikter för människan för bekräftelse.
"Roboten (AI) gör allt det hårda arbetet, men människan känner sig fortfarande ansvarig på någon nivå, " han sa.
Sådana system är vanligtvis mycket komplexa att kontrollera, säger prof Stolkin, Men deras tillåter operatörer att helt enkelt musklicka på ett föremål som roboten går till och greppar.
När robotarmen vidrör en yta eller greppar ett föremål, operatören känner kontaktkrafterna genom robothandsken. Att ge fjärroperatörer situationsmedvetenhet om vad som händer i no-go-zonen genom en virtuell känsel är extremt användbart, säger prof Stolkin.
För att handskarna ska fungera, robotarmen måste bete sig adaptivt, reagerar på miljön de möter, han säger. För att uppnå detta, CEA-teamet utvecklade adaptiva mekanismer i armlederna som rör sig mekaniskt precis som fjädrar och är mer motståndskraftiga mot strålning än ömtåliga elektroniska delar.
Nära framtid
RoMaNs team testade framgångsrikt en robotarm med AI-kontrollsystemet de utvecklade, i en radioaktiv miljö 2017, under fullständig kärnsäkerhet och brittiska nationella säkerhetsbestämmelser, på en plats i norra England som drivs av National Nuclear Laboratory. Detta var första gången någonsin en AI-kontrollerad robot distribuerades i en verklig värld, radioaktiv miljö.
Professor Stolkin hade tidigare föreställt sig att det kan ta åtminstone ytterligare ett decennium att överföra dessa teknologier till kärnkraftsindustrin, men säger att planer redan görs för att distribuera dem vid avvecklingsplatser inom en snar framtid.
"När vi föreslog detta, idén med AI-kontrollerade robotar, det ansågs absurt av denna industri, " han sa.