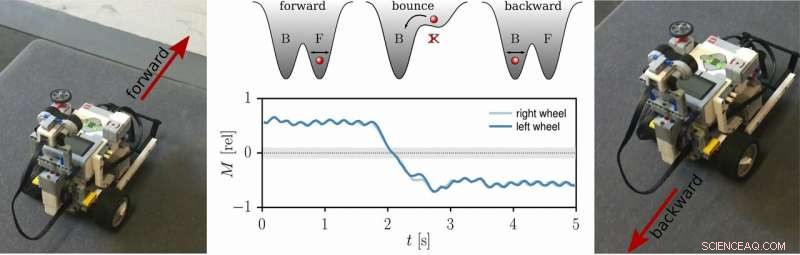
Visar hur roboten självständigt ändrar rörelseriktningarna när den träffar en vägg. Kredit:Sándor et al.
Ett team av forskare vid Babes-Bolyai University, i Rumänien, och Goethe-universitetet i Frankfurt har nyligen samarbetat i en studie som utforskar implementeringar av kickkontroll på både simulerade och verkliga hjulförsedda robotar. Termen "sparkkontroll" syftar på kort, kommandon av högre ordning som kan användas för att "sparka" ett system från en självorganiserad attraktion till en annan attraktionsbassäng.
"När vi flyttar, reagerar våra muskler bara på signalerna som hjärnan skickar, eller tar de även hänsyn till ledernas tillstånd, av senor och av själva musklerna?" frågade Claudius Gros, en av forskarna som genomförde studien. "Man talar om 'förkroppslig rörelse, ' om det senare är fallet. Vår forskning är dedikerad till att undersöka hur förkroppsligande hjälper djur och robotar att navigera i världen."
I naturen, även djur med enkla nervsystem kan navigera i en mängd olika komplexa miljöer. För att kunna röra sig i både kända och okända miljöer, robotar bör ha liknande sensorimotoriska färdigheter. Än så länge, dock, Forskare och ingenjörer världen över har kämpat för att designa robotar med motoriska egenskaper som liknar människors och djurs.
"Att koordinera ett stort antal ställdon i en ständigt föränderlig miljö är verkligen en utmanande uppgift, " Bulcsú Sándor, en annan forskare involverad i studien, berättade för TechXplore. "Så varför låter vi inte robotens kropp göra det hårda arbetet, genom att ta över en betydande del av beräkningen? Efter denna idé, vi föreslår ett alternativt kontrollschema där rörelsemönster genereras på ett självorganiserat sätt. Inom denna ram, rörelse skapas via en dynamisk interaktion mellan hjärnan och robotens kropp, och miljön."
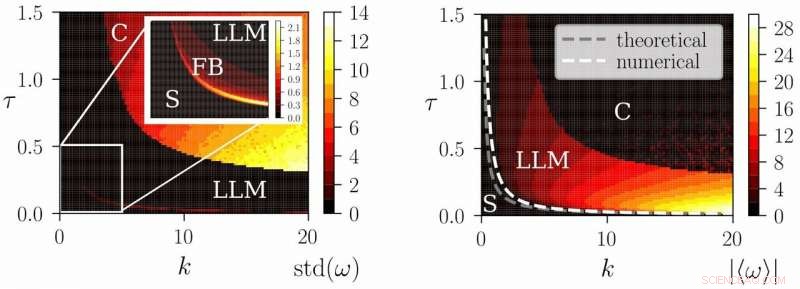
Fasdiagram av systemet:dynamiska beteenden som en funktion av styrenhetens parametrar.
Sándor, Gros och deras kollegor utarbetade ett kontrollramverk där rörelser inte är strikt definierade, utan beskrivs snarare av en uppsättning ekvationer för att styra ställdon som förändras dynamiskt, införlivande av kroppens proprio-sensoriska information. De testade och förfinade sedan dessa ekvationer i LPZRobots simuleringsmiljö.
"På grund av robotens interaktion med sin miljö, flera självorganiserade rörelsemönster kan skapas, ", sade Sándor. "Detta tillåter oss att växla mellan dessa beteendemässiga primitiver genom en väldefinierad kickliknande kontrollsignal. Detta är vad vi kallar "sparkkontroll". Till sist, som ett bevis på konceptet, vi implementerade den här idén på verkliga robotar på hjul."
Att koordinera sammandragningen av de många musklerna i kroppen är en mycket utmanande uppgift, som är medfödd förvärvad av de flesta människor och djur. I deras studie, Sándor, Gros och deras kollegor försökte hitta en enklare metod för att ingjuta motorik hos robotar.
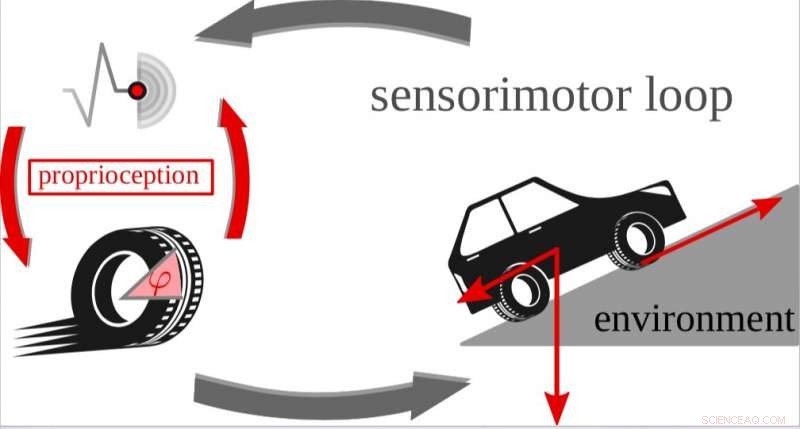
Skiss av en följsam sensorimotorisk slinga, kunna anpassa sig till miljön. Kredit:Sándor et al.
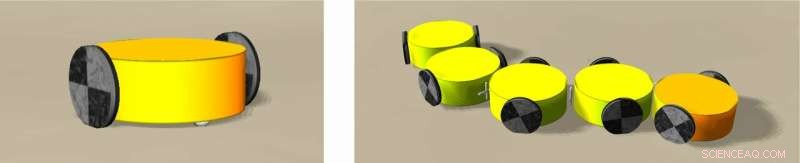
Simulerade robotar (en bil, 5 bilar kopplade till ett tåg). Kredit:Sándor et al.
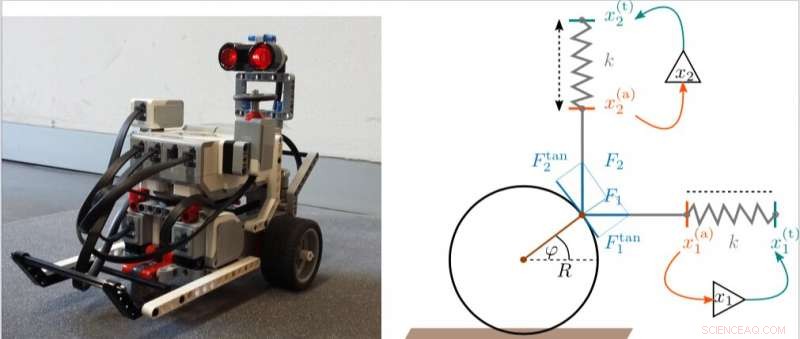
Lego-robot och kontrollmekanismen vi använde. Kredit:Sándor et al.
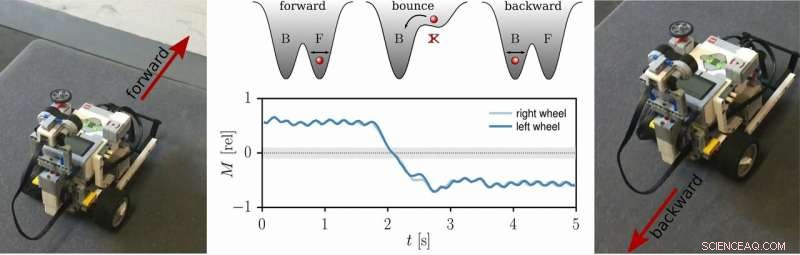
Visar hur roboten självständigt ändrar rörelseriktningarna när den träffar en vägg. Kredit:Sándor et al.
"Skulle det inte vara mycket enklare om hjärnan bara skulle ge en kort kicksignal och kroppen på antingen ett djur eller robot skulle utföra en välkoordinerad rörelse av sig själv?" sa Gros. "Detta är nyckelidén bakom sparkkontroll. Det kan förverkligas, som vi upptäckte, när roboten gör sig av med självorganiserade ställdon."
Forskarna utvärderade sitt ramverk på både simulerade och verkliga hjulförsedda robotar, genererar dynamiken hos distinkta hjul oberoende via lokala återkopplingsslingor. Dessa återkopplingsslingor förmedlas av hastighetskodande neuroner, som bearbetar propriosensoriska indata som beskriver den faktiska rotationsvinkeln för varje hjul. Senare, en simulerad transmissionsstav som liknar de som används i ånglok översätter förändringar i neural aktivitet till en roterande rörelse.
"Vi visar hur självorganiserade rörelsemönster kan användas för att generera förkroppsligade rörelser, ", sade Sándor. "Att använda det här kontrollschemat kan hjälpa till att förenkla komplexa beräkningar som måste utföras för att utföra olika förflyttningsuppgifter. Att kombinera det med andra metoder kan leda till kraftfulla verktyg för att generera komplexa robotbeteenden. Vår ram skulle också kunna bidra till förståelsen av djurs och människors förflyttning."
Studien utförd av Sándor, Gros och deras kollegor kan leda till en ny teknik för att effektivt kontrollera robotars rörelser. Den viktigaste praktiska fördelen med deras ramverk är att den allokerar en del av beräkningsbelastningen till robotens kropp. Deras modell kan också användas för att lära ut dynamiska system i gymnasiekurser i fysik, eftersom det möjliggör interaktiva och engagerande demonstrationer.
Forskarna planerar nu att testa sina algoritmer på mer komplexa robotarkitekturer, införliva olika sensoriska modaliteter i sina ekvationer. Till exempel, de skulle kunna tillämpa kickkontroll på en hierarkisk organisation av kontrollanter, där visuell information utlöser ett visst rörelsesätt.
"Vi arbetar för närvarande med att generalisera våra principer till robotar med ben, i synnerhet hexapoder, och våra första resultat är lovande, ", sa Gros. "Vi undersöker också aktiveringen av sparkkontroll genom sensorisk information."
© 2019 Science X Network














