Illustration av ATRIUM radarmålsimulator. Upphovsman:Fraunhofer FHR
Sensorer i autonoma fordon måste vara extremt pålitliga, eftersom bilister i framtiden inte längre ständigt kommer att övervaka trafiken medan de är på gång. Tidigare har dessa sensorer utsatts för krävande vägprov. Den nya ATRIUM -testanordningen från Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR gör det nu möjligt att flytta en stor del av dessa tester till laboratoriet. ATRIUM ställer ut för bilens radarsensor, generera konstgjorda landskap som kommer mycket nära de faktiska förhållanden som uppstår i gatutrafik.
Morgondagens bil kör själv. Passagerare kommer att röra sig längs vägen som om de körs av en privat chaufför medan de njuter av konversation, läsa en tidning eller kanske titta på en video. Även om förarassistanssystem som automatisk avståndskontroll inte längre är nya på marknaden, det kommer fortfarande att gå flera år innan helt autonoma bilar tar sig ut på gatorna. Detta beror på att den involverade tekniken måste vara helt tillförlitlig. Sensorerna är den avgörande faktorn här:Till exempel, dagens radarsensorer kan redan självständigt upptäcka hinder och aktivera bromsar vid fara. Dessa och andra sensorer testas noggrant innan de installeras i bilen. Och autonoma fordon kräver en ännu högre tillförlitlighet, eftersom om föraren inte längre sitter vid ratten, fordonstillverkaren kan mycket väl vara ytterst ansvarig för att undvika en olycka.
Det är därför biltillverkarna ställer relativt höga krav när det gäller sensorsäkerhet. De kräver sensorer som inte orsakar mer än ett enda fel på körsträckor på flera miljoner kilometer, vilket innebär att dagens bilar ofta måste genomföra mycket långa vägprov. "Det är många kilometer, "säger Dr.-Ing. Thomas Dallmann, Leader Research Group Aachen vid Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR. "Dessutom, flera sensorer måste testas för att statistiskt bevisa deras tillförlitlighet. Det betyder att flera testfordon med sensorer måste spendera ganska lång tid på vägen. "En annan svårighet:Om ett fel uppstår efter flera tusen kilometer, sensorn måste optimeras och vägproven måste börja om igen, en extremt tidskrävande process.
Flytta vägprov till labbet
För att förenkla denna situation, försök görs för att simulera verkligheten och föra vägtesterna till laboratoriet. Denna typ av laboratorietest finns redan för radarsensorer. Radarsensorer avger en radiosignal som reflekteras av olika objekt. Baserat på ekot, elektroniska sensorsystem kan sedan analysera omgivningen, mäta avståndet till detekterade objekt och hastigheten med vilken de rör sig.

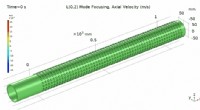
Enkanalsversion av ATRIUM radarmålsimulator. Upphovsman:Fraunhofer FHR
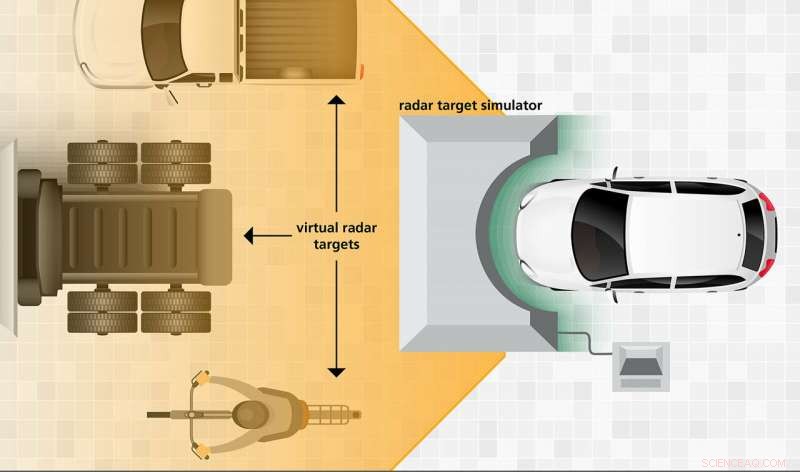
Denna princip har redan simulerats i laboratoriet med hjälp av vad som kallas radarmålsimulatorer. Dessa simulatorer samlar radarvågorna som släpps ut från fordonsradarn och modifierar radarsignalen för att bete sig som om den hade stött på föremål. Simulatorn returnerar sedan informationen till bilen i form av en artificiell ekobild. Således genererar radarmålsimulatorn ett simulerat landskap för fordonets radar. Fördelen är uppenbar:Testriggen med en bilradar och radarmålsimulator kan köras i laboratoriet dag och natt, utan att behöva sätta en bil på gatan.
Tyvärr, de få radarmålsimulatorer som finns på marknaden idag är inte i närheten av att kunna generera ett komplett ekolandskap. "De flesta modellerna kan bara generera en mycket begränsad bild med ett ensiffrigt antal reflektioner som återförs till bilens radar, "säger Dallmann." Det är ett extremt litet antal jämfört med situationen i en naturlig miljö. "När allt kommer omkring verkligt landskap innehåller hundratals reflekterande objekt:människor, bilar, träd, Trafiksignaler. Även ett enda fordon i trafiken kan generera olika reflektioner från olika vinklar, till exempel en personbil vars stötfångare, hjul och sidospeglar reflekterar annorlunda. "Vi är fortfarande väldigt långt borta från en realistisk miljö när det gäller att testa sensorer för autonom körning, "fortsätter ingenjören.
Radarmålsimulator genererar så många som 300 reflektioner
Det är därför Dallmann och hans team utvecklar ett nytt, högpresterande radarmålsimulator kallad ATRIUM (den tyska akronymen för "Automotive testmiljö för radar-in-the-loop-test och mätningar"), kan generera betydligt fler reflekterande objekt. Det nuvarande målet för Fraunhofer FHR är att kunna generera 300 reflektioner när projektet slutar, ett oerhört mål. "Detta kommer att innebära att ATRIUM kan presentera bilens radarsensor med en relativt verklighetstrogen scen, något som en inkörningsfilm för radarsensorn. "
Eftersom en patentansökan har lämnats in för ATRIUM -tekniken, Thomas Dallmann kan ännu inte avslöja några detaljer. Men han kan säga:"Vi har optimerat överföringskanalernas struktur, vilket gör dem mycket mer kostnadseffektiva. Som ett resultat, reflektionerna kan representeras på ett sådant sätt att de når radarn från ett antal olika riktningar. "Detta kan göra det möjligt att testa nya sensorer för autonoma fordon i full omfattning och under mycket realistiska förhållanden i labbet." I framtiden , vi kommer att kunna köra mycket komplexa tester, vilket kommer att göra det mycket möjligt
minska tiden för vägtester. "Dallmann och hans kollegor kommer att presentera laboratorietestanläggningen med fordonsradar och ATRIUM radarmålsimulator på Automotive Testing Expo i Stuttgart från 21 till 23 maj.