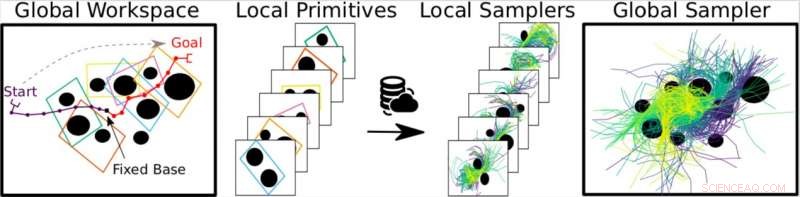
En illustration av det föreslagna ramverket i en plan manipulator. Kredit:Chamzas, Shrivastava &Kavraki.
Medan människor kan utföra rörelser naturligt och omedelbart, Robotar kräver avancerade rörelseplaneringsstrategier för att kunna navigera i sin omgivning. Rörelseplanering är därför ett nyckelområde inom robotforskning, syftar till att utveckla verktyg och tekniker som gör att robotar kan arbeta självständigt i en mängd olika miljöer.
Medan tidigare studier har introducerat en mängd olika tekniker för rörelseplanering, framför allt samplingsbaserade algoritmer, de flesta av dem fungerar inte optimalt i alla miljöer. En viktig begränsning för många av dessa tillvägagångssätt är att de approximerar anslutningen av högdimensionella utrymmen med ett litet antal prover, som hindrar deras prestanda i scenarier där områden som är nödvändiga för anslutning av utrymmet har låg sannolikhet att samplas. Detta kallas vanligtvis "problemet med smala passager".
För att ta itu med begränsningarna hos befintliga rörelseplaneringsmetoder, forskare vid Rice University, i Texas, har utvecklat ett nytt tillvägagångssätt som bryter ner arbetsytan i lokala primitiver, memorera sina lokala erfarenheter i form av lokala provtagare och lagra dessa i en databas. Deras metod, beskrivs i ett papper som för publicerats på arXiv, är främst ett bevis på konceptet, eftersom den hittills bara har testats i en ganska förenklad geometrisk miljö. Ändå, dessa forskares arbete har potential att lösa några viktiga utmaningar som man stöter på i forskning om rörelseplanering.
"Vår studie fokuserade enbart på det geometriska rörelseplaneringsproblemet, "Constantinos Chamzas, en av forskarna som genomförde studien, berättade TechXplore . "I ett nötskal, du har en robot och några hinder och du vill hitta en väg för att flytta din robot från punkt A till punkt B utan att kollidera med hindren. "
Förutom dessa allmänna rörelseplaneringsmöjligheter, i verkliga scenarier (t.ex. när han utför hussysslor) bör en robot också lösa kontinuerligt upprepade rörelseplaneringsfrågor. De flesta befintliga metoder för rörelseplanering tvingar robotar att slutföra verkliga uppgifter genom att lösa nya frågor från grunden, även om en ny fråga liknar en som slutfördes med framgång tidigare.

Exempel på att en robot plockar upp cylindrar från en bokhylla, vilket är en uppgift med upprepade rörelseplaneringsfrågor. Kredit:Chamzas, Shrivastava och Kavraki.
Forskare försöker därför utveckla nya tekniker som använder lösningarna på tidigare rörelseplaner för att informera sökandet efter en lösning på en ny liknande rörelseplaneringsfråga. Tillvägagångssättet som utvecklats av Chamzas och hans kollegor uppnår detta genom att använda tidigare miljörelaterad kunskap som specifikt inriktar sig på tidigare påträffade trånga passager för att anpassa sin provtagningsstrategi för det aktuella problemet.
"Under träningen, den föreslagna metoden delar upp det givna problemet i enklare delproblem, lösa var och en individuellt, och lagrar sedan dessa sub-lösningar i en databas i form av samplingsfördelningar, Chamzas förklarade. "När ett nytt planeringsproblem uppstår, det globala problemet bryts ner till lokala igen, och vår metod hämtar relevanta samplingsfördelningar som motsvarar de lokala för att skapa en global samplingsfördelning som styr sökningen mycket mer informativt. "
Väsentligen, rörelseplaneringsmetoden som Chamzas och hans kollegor utarbetade delar upp ett problem i delproblem, kombinera traditionella databasmetoder med informerad urval. Detta skiljer det från befintliga tillvägagångssätt, som vanligtvis använder en databas med förberäknade lösningar som repareras under körning eller använder modeller som försöker sluta sig till en bra samplingsfördelning för en given miljö.
"De två huvudsakliga bidragen från vår studie är att vissa problem, som tidigare var praktiskt taget omöjliga att lösa med traditionella metoder, kan lösas genom att dekomponeras och att användning av denna kombination av databaser/sampling är effektivare i vissa fall än andra metoder, " sa Chamzas.
Än så länge, forskarna har utvärderat sin metod i preliminära tester med enkla geometriska primitiv. Resultaten är lovande, eftersom deras metod tillät dem att lösa problem som tidigare tillvägagångssätt antingen inte kunde lösa eller löste mycket dåligt.
I framtiden, det tillvägagångssätt som föreslagits av Chamzas och hans kollegor kan hjälpa till att övervinna några av begränsningarna i befintliga metoder för rörelseplanering, låter robotar överföra tidigare förvärvad kunskap till olika miljöer och på så sätt förbättra deras prestanda. Forskarna planerar nu att tillämpa samma tillvägagångssätt i mer komplicerade geometriska miljöer. De skulle också vilja utforska sätt på vilka deras metod kan lära sig samplingsfördelningar, snarare än att anpassa dem till äldre lösningar.
© 2019 Science X Network