
Utmatning av det neurala nätverket för att styra robotmotorerna. Upphovsman:Blanchard, Aihara &Levi.
Under de senaste åren har ett växande antal studier har syftat till att utveckla robotar inspirerade av naturen, särskilt av vissa djurarter. I en studie publicerad i Atlantis Press Journal of Robotics, Nätverk och artificiellt liv, ett team av forskare vid University of Bordeaux och University of Tokyo har skapat en robot som liknar en orm i både sin form och rörelser.
"Huvudsyftet med denna forskning var att utveckla en robot för biomedicinska tillämpningar, särskilt ryggmärgsskador, "Timothée Levi, en av forskarna som genomförde studien, berättade TechXplore. "Vi skulle vilja designa nya neuroproteser där de artificiella neuronerna kan ersätta de biologiska. I vår robot, vi använde en biomimetisk rörelse med hjälp av biomimetiska spikande neurala nätverk, som återger samma beteende som ormar har i naturen. "
En av de viktigaste utmaningarna när vi utvecklar bioinspirerade robotar är att effektivt återge rörelsen hos djuret av intresse. Hos djur, de flesta rörelser genereras av aktiviteten hos centrala mönstergenerering (CPG) nätverk.
Väsentligen, CPG är neuronala kretsar som, när den är aktiverad, kan producera rytmiska motoriska mönster (t.ex. promenader, andas, simning, etc.) i avsaknad av sensoriska och tidsrelaterade ingångar. Förr, CPG och deras effekter på djurens rörelse har varit i fokus för ett stort antal studier.
Rent generellt, forskare som försöker utveckla djurliknande robotar replikerar CPG med enkla neuronmodeller eller oscillatorer, som inte är biologiska tidsskalor, och anses därför vara bioinspirerade system snarare än biomimetiska. Dessa modeller, dock, ge bara sinusformiga svängningar, och kan därför inte troget reproducera en mängd olika djurförflyttningsmönster.
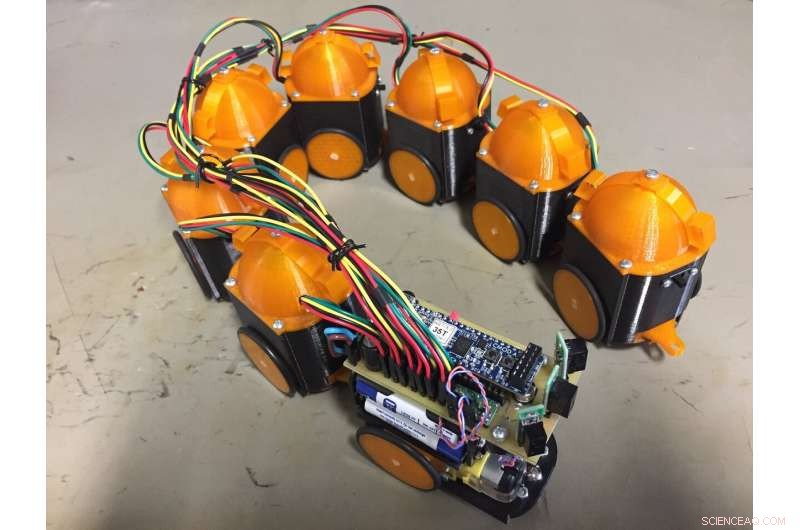
Ormroboten som utvecklats av forskarna. Upphovsman:Blanchard, Aihara &Levi.
I deras studie, Levi och hans kollegor satte sig för att utveckla biomimetiska CPG som effektivt kan replikera biologiskt beteende, med hjälp av ett digitalt neuromorf system i realtid. Ormroboten de utvecklade har två nyckelkomponenter, den ena fungerar som hjärnan och den andra som kroppen.
"Vår ormrobot kan delas upp i två delar, "Förklarade Levi." Den första är dess hjärna, med hjälp av biomimetiska neurala nätverk. Detta neurala nätverk ligger mycket nära biologi med biofysiskt neuronmodell, synapser och plasticitet. Den andra delen är kroppen, som har olika "vagnar" som modellerar den olika delen av ryggmärgen och segment av ormar. Signalen skapas av ormhjärnan och den sprids i hela kroppen som styr de olika motorerna. "
Ormroboten som skapats av Levi och hans kollegor styrs i realtid av ett nätverk av biomimetiska CPG. Forskarna visade att deras system kan kopplas till biologiska neuroner och kan också användas för att simulera olika hypoteser eller protokollbehandlingar för biomedicinska tillämpningar, såsom ryggmärgsskador och neuroprostetik.
"Enligt min åsikt, den mest meningsfulla aspekten av vår studie är att vi försökte vara biologiska trogen och lyckades bädda in det neurala nätverket i en liten elektronisk pärla, "Sa Levi." Intressant nog, roboten vi skapade fungerar i realtid och har samma specifikationer som i naturen (rörelseperiod, variabilitet, ljud, etc.)."
I framtiden, ormroboten som utvecklats av Levi och hans kollegor kan ha en mängd intressanta applikationer inom robotik och andra områden. Till exempel, den kan användas för att bättre förstå beteendet hos reptilier eller så kan den ha flera biohybrid-robotapplikationer.
"Vi planerar nu att lägga till mer intelligens i robotens hjärna med inlärningsregler, samt att använda de olika sensorerna, "Sa Levi." Dessutom, ett av våra långsiktiga mål är att kombinera artificiella neuroner och levande neuroner för att skapa en bio-hybridrobot. "
© 2019 Science X Network














