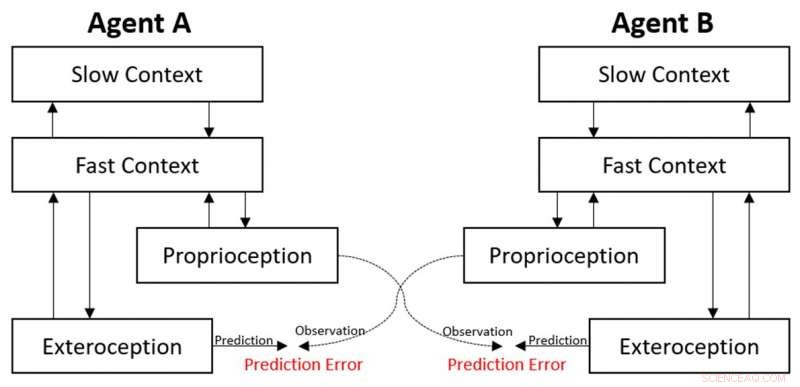
Modellen utvecklad av forskarna. Kredit:Hwang, Wirkuttis &Tani.
Forskare vid Okinawa Institute of Science and Technology har nyligen föreslagit en neurorobotteknik som kan hjälpa utvecklingen av robotar med avancerad kommunikationskapacitet. Deras tillvägagångssätt, presenterad i ett papper som för publicerats på arXiv, baseras på två nyckelfunktioner:stokastisk neural dynamik och förutsägelsefelminimering (PEM).
"Vår forskning fokuserar i stort på att bygga robotar baserade på hjärnans nyckelprinciper, "Jungsik Hwang, en av forskarna som genomförde studien, berättade TechXplore. "I den här studien, vi fokuserade på principen om förutsägelsefelminimering (PEM). Huvudtanken är att hjärnan är en förutsägelsemaskin, göra förutsägelser konsekvent och minimera förutsägelsefel när en förutsägelse skiljer sig från observationer. Denna teori har använts i stor utsträckning för att förklara många aspekter av kognitiva beteenden. I den här studien, vi försökte undersöka om denna princip kan tillämpas på en social situation."
På senare år har forskare har genomfört ett flertal studier som syftar till att artificiellt replikera många djurs medfödda kommunikationsförmåga, inklusive människor. Även om många av dessa studier har uppnått lovande resultat, de flesta befintliga lösningar uppnår inte mänsklig jämförbar noggrannhet.
"En av de utmanande uppgifterna för en robot med kommunikationsförmåga är att känna igen en annans avsikt bakom observerat beteende, " Hwang förklarade. "Ett vanligt tillvägagångssätt för att lösa detta problem är att betrakta det som en klassificeringsuppgift. Målet blir då att erhålla rätt etikett (användaravsikt) med given observation (användarbeteende) med hjälp av klassificeraren. Dessa dagar, det populära valet för sådana klassificerare är modeller för djupa neurala nätverk, såsom konvolutionella neurala nätverk (CNN) och långtidsminne (LSTM)."

Kredit:Hwang, Wirkuttis &Tani.
I sin studie, Hwang och hans kollegor föreslog ett annat tillvägagångssätt för att lösa detta problem baserat på stokastisk neural dynamik och PEM. Forskarna tillämpade sitt tillvägagångssätt på två små humanoida robotar, kallas ROBOTIS OP2, och testade det i olika situationer som involverade interaktioner mellan människa-robot och robot-robot.
"Med vårt tillvägagångssätt, roboten gör konsekvent förutsägelser om beteendet hos agenten som den interagerar med, " sa Hwang. "När en förutsägelse skiljer sig från deras observation, roboten uppdaterar sin tro så att den korrekta förutsägelsen kan göras (d.v.s. minimerar förutsägelsefel). Därför, i detta tillvägagångssätt är avsiktsigenkänning inte en klassificeringsuppgift, men en aktiv process som innefattar uppdatering av "övertygelser" för att förstå vad som har hänt under det senaste förflutna. När det gäller maskininlärning, detta kan betraktas som ett slags onlinelärande."
I preliminära utvärderingar med humanoida robotar, forskarna fann att att kunna förutsäga andras beteende och minimera förutsägelsefel spelade en nyckelroll i sociala situationer. Genom att använda deras tillvägagångssätt, robotarna kunde imitera handlingarna hos agenterna de interagerade med; en mänsklig användare i HRI-inställningar (human-robot interaction) och en annan robot i RRI-inställningar (robot-robot interaction). När deras tillvägagångssätt inte tillämpades på robotarna, å andra sidan, robotarnas interaktioner med andra agenter präglades av vardagliga mönster och repetitiva beteenden.

Kredit:Hwang, Wirkuttis &Tani.
"Med hjälp av PEM-mekanismen, roboten kan inte bara snabbt anpassa sig till en föränderlig miljö utan också förutsäga vad som kommer att hända i framtiden, " Hwang förklarade. "Denna metod kan alltså tillämpas på andra omgivande intelligenstjänster där AI konsekvent gör förutsägelser om användare och anpassar sig till dem, eller till och med proaktivt ger förslag baserat på tidigare observationer."
I framtiden, det tillvägagångssätt som utvecklats av Hwang och hans kollegor skulle kunna bidra till utvecklingen av robotar med bättre kommunikationsförmåga. Intressant, forskarna observerade också att när två robotar interagerade med varandra med deras tillvägagångssätt, några nya och ovanliga kommunikationsmönster uppstod, antyder att deras tillvägagångssätt möjliggör en mer avancerad typ av kommunikation.
"Det finns fortfarande många intressanta forskningsriktningar som kan utforskas i den här miljön, " sa Hwang. "Till exempel, Jag är intresserad av att ha ett gesturalt Turing-test där en användare interagerar med en robot som kan styras av en annan person bakom väggen eller AI. Om man inte kan identifiera vem som styr roboten, kan vi säga att roboten har intelligensen att interagera med människor? Vilka typer av hjärnans principer skulle vara väsentliga för att illustrera mänsklig likhet i sådana sociala miljöer? Det här är några frågor som jag skulle vilja utforska i framtiden."
© 2019 Science X Network