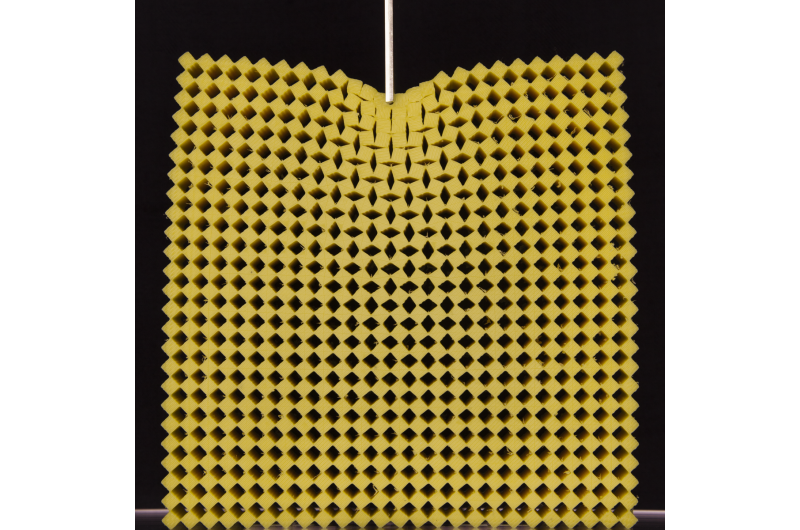
En illustration av forskarnas flytande fingertoppskoncept. Kredit:Mizushima et al.
Forskare vid Kanazawa University har nyligen utvecklat ett friktionsreduceringssystem baserat på en smörjande effekt, som kan ha intressanta mjuka robotapplikationer. Deras system, presenteras i en artikel publicerad i Taylor &Francis' Avancerad robotik tidning, kan hjälpa utvecklingen av robotar som effektivt kan manipulera föremål under både torra och våta förhållanden.
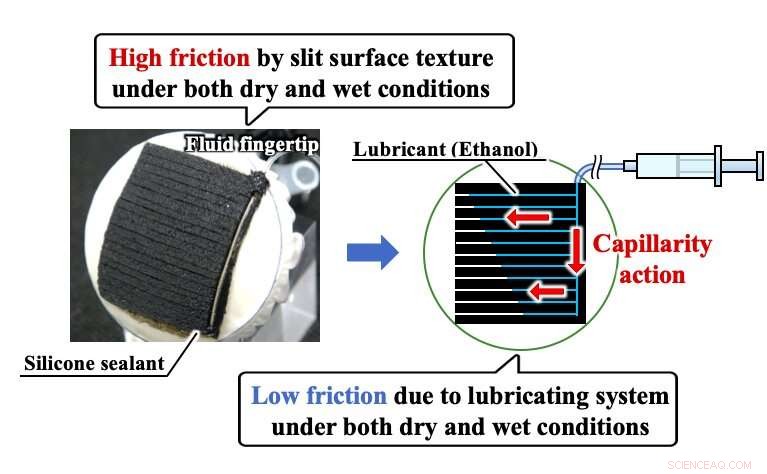
"Vår tidigare utvecklade ytstruktur eller hud för mjuka robothänder ger hög friktion under både torra och våta förhållanden, "Tetsuyou Watanabe, en av forskarna som genomförde studien, berättade för TechXplore. "Dock, denna höga friktion gör flera manipulationsstilar (inklusive släppning och glidning) svåra. I vissa fall, ett gripet föremål fastnar på ytan. För att övervinna detta problem, vi utvecklade ett nytt friktionsreduceringssystem som använder smörjmedel."
När man utvecklar sitt system, Watanabe och hans kollegor hämtade inspiration från mänskligt beteende. De observerade att i stormarknader folk ofta slickar sina fingrar för att öppna plastpåsar eller behållare. Liknande åtgärder utförs också när man försöker plocka upp pappersark eller vända sidorna i en bok.
Forskarna fann att detta "fingerslickande" beteende är särskilt vanligt hos medelålders eller äldre personer, eftersom åldrande vanligtvis leder till torrare hud. Yngre människor, å andra sidan, behöver ofta inte slicka fingrarna när de försöker manipulera plast eller papper, eftersom de automatiskt kan styra hudens friktion via kroppens svettmekanismer.
"Självklart, syftet med att slicka fingrar är att få hög friktion, och helt annorlunda än vårt syfte (d.v.s. reducering av friktion), " Sade Watanabe. "Men, normalt är syftet med smörjmedel att minska friktionen i mekaniska system. Således, vi övervägde möjligheten till ett friktionsreduceringssystem som liknar svettkontroll hos människor."
Forskarna konstruerade en robot fingertopp som har slitsar i sin yta. När smörjmedel (t.ex. etanol) injiceras runt gränserna för dessa slitsar, de tränger igenom hela ytan, via en kapillärverkan.
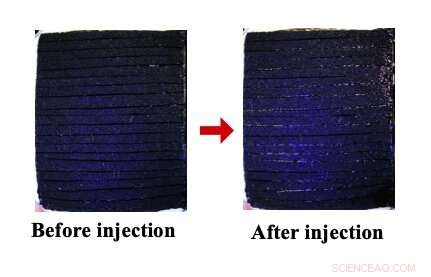
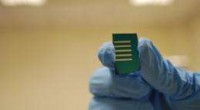
Fingertoppen före och efter etanol injiceras i den. Kredit:Mizushima et al.
"Vi använde den tunna ytan inklusive textur, och systemet fungerar på inte bara stela utan även deformerbara kroppar utan att förlora anpassningsförmågan till ett föremåls form, " sa Watanabe. "Därför, den största fördelen med vårt system är att ytfriktionen kan kontrolleras samtidigt som ytans deformerbarhet och anpassningsförmåga bibehålls. Det betyder att det utvecklade systemet kan fästas på robotar med mjuka kroppar."
På senare år har användningen av mjuka kroppar har blivit allt mer populär inom robotteknik, på grund av deras höga deformerbarhet och anpassningsförmåga. Till exempel, mjuka robotar kan röra sig mer fritt i sin omgivning, utan att uppvisa omfattande skador vid påkörning av väggar eller hinder. Dessutom, mjuka robothänder kan anpassa sig till ett föremåls form medan de greppar det, vilket möjliggör mer avancerade manipulationsstrategier.
"En annan viktig fördel med vårt system är att det fungerar under både torra och våta förhållanden, " tillade Watanabe. "Det är därför mycket användbart för robotar som arbetar i mänskliga miljöer, eftersom hushållsarbete utförs under båda dessa förhållanden."
Forskarna bäddade in sitt system i en robot fingertopp och utvärderade dess prestanda i en serie experiment som involverade att greppa och släppa föremål. Deras resultat tyder på att smörjtekniken de utvecklade effektivt kan minska friktionen under både våta och torra förhållanden.
"Som du kan föreställa dig från det mänskliga beteendet att slicka fingrar, vatten kan öka friktionen och i vissa fall låta huden fastna på ytor, " Sade Watanabe. "Däremot, etanol minskar friktionen. Den viktiga faktorn för friktionsreduktion är spridningskoefficienten nära förknippad med kapillärkrafter (dvs ytspänning)."
I detta sammanhang, en låg kapillärkraft medför lätt diffusion av vätska genom en yta. Använda etanol, som har en låg kapillärkraft, forskarna kunde minska friktionen och enkelt sprida smörjmedlet över hela fingertoppens yta. En ytterligare fördel med etanol är dess höga flyktighet, vilket minskar takttiden avsevärt.
"Vi observerade också att för att underlätta funktionen av vårt system, ytan ska inte vara helt slät, " Tillade Watanabe. "En yta som är lite grov eller ojämn kan förbättra dess funktion ytterligare."
Robotar kan snart stödja människor i en mängd olika miljöer, till exempel att hjälpa dem med hushållsarbete eller ge omvårdnad. Eftersom dessa uppgifter i allmänhet utförs under både torra och våta förhållanden, forskarnas friktionsreduceringssystem kan vara till stor hjälp.
"Hantering och manipulering av objekt är huvudmålen för vår forskning och sedan är uppgifterna inklusive sådana åtgärder de riktade applikationerna, " Sade Watanabe. "Några exempel är vikbara kläder, matlagning, tvättning, etc."
I framtiden, smörjsystemet utvecklat av Watanabe och hans kollegor kan informera utvecklingen av mjuka robotar som kan manipulera föremål mer effektivt, i både torra och våta miljöer. Forskarna planerar nu ytterligare forskning som syftar till att avgränsa och bredda deras systems möjliga tillämpningar.
"För närvarande, vi har bara kombinerat fingertoppar med vårt system, " Sade Watanabe. "Som ett nästa steg, vi skulle vilja tillämpa vårt friktionskontrollsystem på en robothand. Dessutom, applikationerna för systemet är fortfarande oklara, så vi skulle vilja beskriva lämpliga metoder för verkliga operationer, som att vika eller laga mat."
© 2019 Science X Network