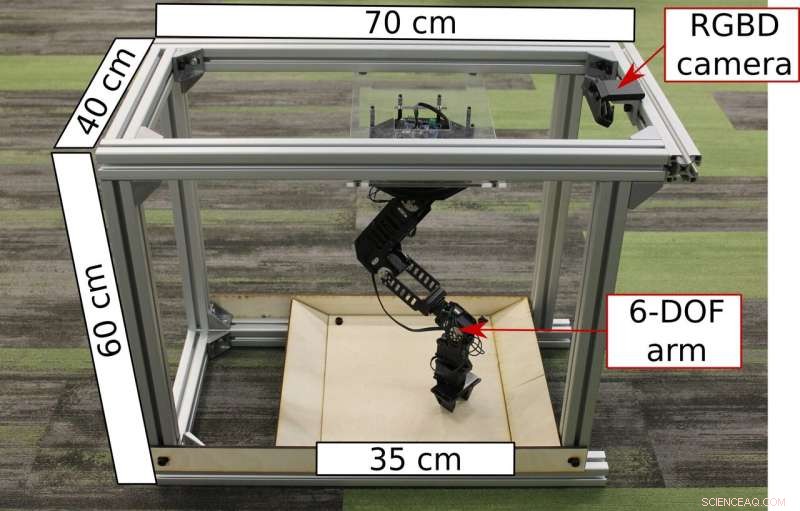
En REPLAB cell närbild med kommentarer. Kredit:Yang et al.
Forskare vid UC Berkeley har utvecklat en reproducerbar, låg kostnad och kompakt benchmarkplattform för att utvärdera robotinlärningsmetoder, som de kallade REPLAB. Deras senaste studie, presenteras i en tidning förpublicerad på arXiv, stöddes av Berkeley DeepDrive, Office of Naval Research (ONR), Google, NVIDIA och Amazon.
"Machine learning-baserade metoder har börjat bli populära inom robotik nyligen, men det finns för närvarande inget enkelt sätt att jämföra tillvägagångssätt på grund av stora skillnader i hårdvaruinställningarna som används i olika labb, "Brian Yang, en av forskarna som genomförde studien, berättade för TechXplore. "Till exempel, att förstå forskning, allt från typen av arm eller gripdon ner till materialet som griparen är gjord av påverkar greppprestandan, så även om du får bättre greppnoggrannhet än en metod från förra året, det är inte klart om det beror på bättre kontroll eller bara bättre hårdvara."
På senare år har det har funnits ett växande behov av standardiserade åtgärder och benchmarkplattformar för att utvärdera maskininlärningsmetoder för robotik. Att upprätta effektiva riktmärken kan ibland vara utmanande, speciellt för robotikinlärning, där robotar förväntas generalisera inlärda modeller till nya objekt och situationer. Den nya benchmark-plattformen som utvecklats vid UC Berkeley ger en billig och lätt reproducerbar lösning för att testa robotobjektmanipulation.
"Andra tillämpningar av maskininlärning som datorseende och naturlig språkbehandling har haft stor nytta av att ha datauppsättningar och riktmärken, när de driver forskningsfokus på viktiga problem, tillhandahålla ett sätt att kartlägga framstegen i en forskargemenskap, och hjälpa till att snabbt identifiera, sprida, och förbättra idéer som fungerar bra, " Dinesh Jayaraman, en annan forskare involverad i studien, berättade för TechXplore. "Vi designade REPLAB för att tjäna denna funktion för forskarsamhället för robotinlärning."
Två REPLAB-celler staplade ovanpå varandra. Kredit:Yang et al.
REPLAB har flera komponenter, inklusive en robotarm, en kamera och en arbetsyta, placeras i ett kubiskt utrymme på 70 x 40 x 60 cm. Plattformen kostar ungefär $2000 att bygga och kan monteras på bara några timmar. Dess kompakta och billiga design skulle kunna tillåta fler forskare, även de med en begränsad budget, att utvärdera sina ramar och tillvägagångssätt.
"REPLAB är en helt standardiserad hårdvaruplattform för robotmanipulation som är designad med enkel användning i åtanke, " Jayaraman förklarade. "Den innehåller en enda lågkostnadsarm (Trossen WidowX), en RGB-D-kamera (Intel Realsense SR300) och en standardiserad, kompakt arbetsyta som är enkel att montera på några timmar med hjälp av vår monteringsanvisning. Allt ihop, en hel REPLAB-cell kostar cirka 2k USD (jämfört med standardarminställningar som kostar 40-50k), tar cirka 10 gånger mindre utrymme än en standardarmsuppställning."
Förutom själva plattformen, forskarna föreslog en mall för ett gripande riktmärke som inkluderar en uppgiftsdefinition och utvärderingsprotokoll, prestationsmått och en datauppsättning på 92, 000 greppförsök. Baslinjerna för detta riktmärke fastställdes genom implementeringen, utvärdering och analys av flera befintliga greppmetoder.
"Eftersom vi har denna standardiserade hårdvaruplattform, vi kan också dela ett mjukvarupaket med öppen källkod med implementeringar av olika robotinlärningsalgoritmer (hittills, övervakade inlärningsalgoritmer för att greppa och förstärka inlärningsalgoritmer för 3D-punktnåkning), " sa Jayamaran. "Om du konstruerar en egen REPLAB-cell, du kan ladda ner en Docker-bild som innehåller dessa implementeringar och köra dem direkt på din cell."
En REPLAB-cell utan anteckningar. Kredit:Yang et al.
Än så länge, forskarna har i första hand genomfört utvärderingar som syftar till att verifiera genomförbarheten av REPLAB som en plattform för reproducerbar forskning inom robotikinlärning, fokusera på två speciella uppgifter:att greppa och nå 3D-punkten. Med andra ord, de har använt sin plattform för att implementera och utvärdera flera djupa övervakade inlärningsmetoder för dessa speciella greppuppgifter. Deras resultat tyder på att plattformen utsätter befintliga algoritmer för något understuderade utmaningar som är avgörande för utvecklingen av robotar som presterar bra i naturen, såsom bullriga aktivering.
"Vi har också verifierat att resultaten förblir konsekventa över flera REPLAB-celler, vilket är viktigt för att tänka på REPLAB-baserade algoritmimplementationer och utvärderingar som reproducerbara, " Sa Jayamaran. "Vi tror att REPLAB kommer att underlätta konsekventa och reproducerbara framstegsmått för robotinlärning, sänk barriären för inträde i robotik för forskare inom relaterade discipliner som maskininlärning, och uppmuntra delbar kod och data mellan forskare."
Den nya plattformen introducerad av Yang, Jayaraman och deras kollegor kan snart tillåta fler forskare att utvärdera tillvägagångssätt för ett brett spektrum av manipulationsuppgifter. Liksom andra benchmank-plattformar, dock, för att lyckas, Användningen av REPLAB bör involvera forskarsamhället för robotlärande i stort.
"Medan vi investerar i att underhålla plattformen i många år framöver, vi bjuder in bidrag från samhället, som nya algoritmimplementationer, datauppsättningar, och benchmarks och till vår öppen källkodsplattform, " Sa Jayaraman. "Den stora visionen är att nå en punkt där om en ny toppmodern robotinlärningsalgoritm släpps, en forskare som sitter var som helst i världen skulle kunna ladda ner, utvärdera, upprepa och förbättra en implementering inom några dagar. Vi tror att REPLAB hjälper till att påskynda forskningen genom att göra två saker:att sänka inträdesbarriären och låta många fler människor delta i den senaste forskningen, och tillåter denna typ av snabb iteration och förbättring genom koddelning."
I deras framtida arbete, forskarna vid UC Berkeley planerar att utveckla sin plattform ytterligare, lägga till en komplett REPLAB-cellsimulator och algoritmer för robust kontroll, samtidigt som man tar sig an nya manipulationsutmaningar. De hoppas också kunna bredda den officiella REPLAB github-repo och docker-bilden, inklusive implementeringar av mer toppmoderna algoritmer.
© 2019 Science X Network