Upphovsman:Obute, Dogar &Boyle.
Många djur och mikroorganismer klarar komplicerade uppgifter, som att hitta mat eller bygga bo, som ett lag, eller "svärm". Ett av de mest uppenbara exemplen på detta är bin, eftersom deras överlevnad som grupp i hög grad beror på samarbete med andra medlemmar i deras koloni. Under de senaste åren, ett växande antal forskare har försökt återge denna fascinerande gruppdynamik i robotar, ger upphov till ett studieområde som kallas svärmrobotik.
Forskare vid University of Leeds har nyligen presenterat en ny metod för svärmrobotik som kallas kemotaxi, inspirerad av ett särskilt beteende som observerats hos mikroorganismer, . Deras studie, förpublicerad på arXiv, härstammar från författarnas intresse för att överleva enkla ryggradslösa djur i dynamiska verkliga miljöer, och hur dessa strategier kan tillämpas i robotar.
"Under min doktorsexamen och första postdoktorat, Jag studerade rörelsessystemet för en liten mask som kallas C. elegans (en populär modellorganism), och framgångsrikt tillämpat det jag lärde mig för att styra rörelsen för en ormliknande robot, "Jordan Boyle, en av forskarna som genomförde studien, berättade TechXplore. "Det nuvarande arbetet är inspirerat av samma organism, men den här gången, tittar på dess beteende på högre nivå - specifikt hur det navigerar mot matkällor med sitt luktsinne. "
I avsaknad av sensoriska ingångar, C. elegans maskar går vanligtvis framåt, men gör stora varv med slumpmässiga tidsintervall. Om de känner att en "positiv" lukt blir starkare när de rör sig i en viss riktning, frekvensen av deras svängar minskar. Omvänt, när den "positiva" eller "önskade" lukten blir svagare, det är större sannolikhet att de vänder. Detta beteende, känd som kemotaxi, i slutändan tillåter dem att dra sig mot platser där en önskad sensorisk stimulans är på topp. I deras studie, Boyle, hans kollega Mehmet Dogar och Ph.D. studenten Simon Obute gav sig ut för att replikera denna gruppstrategi i robotsvärmar och utvärdera dess användbarhet.
"En viktig fördel med denna strategi är att den bara behöver en enda analog sensor, eftersom lutningar detekteras över tiden när djuret rör sig, "Boyle förklarade." I vårt arbete, vi har ersatt lukten med ljud, eftersom det är mycket lättare att skapa och känna med en robot, och blir också svagare när du kommer längre från källan, "Boyle förklarade." De viktigaste fördelarna med detta tillvägagångssätt är att det gör att en grupp svärmrobotar kan begränsas till ett specifikt område (dvs. runt en ljudkälla) utan att behöva en fysisk gräns, kartläggningsförmåga eller komplexa sensoriska system. "
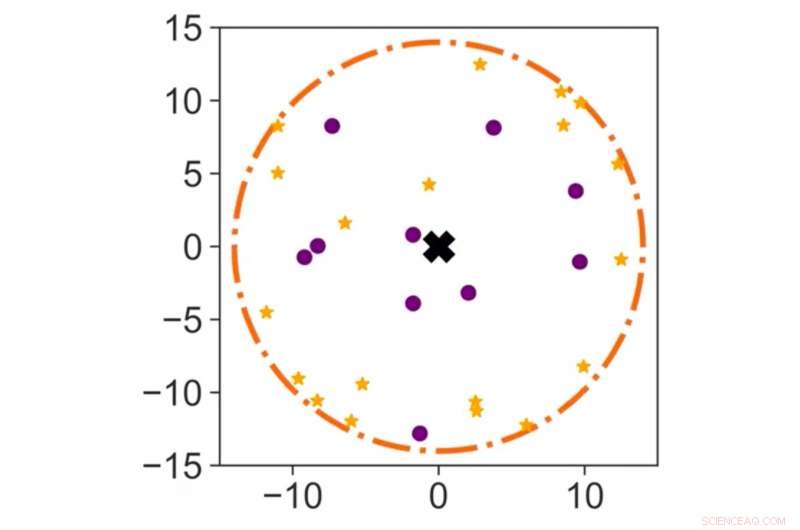
Med hjälp av en algoritm som de utvecklat, forskarna applicerade kemotaxi på en svärm av prospekteringsrobotar, slutligen att få dem att återvända till ett visst arbetsområde runt sitt bo som ligger i en obegränsad miljö. De testade deras prestanda, och därmed effektiviteten i deras tillvägagångssätt, i en serie simulerings- och hårdvaruvalideringsexperiment. Även om deras resultat främst baseras på simuleringar och inte verkliga implementeringar, forskarna fann att de lyckades införliva exakta modeller för ljudutbredning.
"Våra hårdvaruresultat är preliminära men lovande vid denna tidpunkt, "Sa Boyle." I slutändan, detta arbete kan vara relevant för fysiska svärmar som består av mycket små, billiga robotar med begränsade sensoriska och beräkningsmöjligheter. Även om det är praktiskt, verklig distribution av robotsvärmar är fortfarande en bit bort, de har potential i många applikationer. "
I framtiden, experiment med riktiga robotar kan hjälpa till att fastställa effektiviteten av detta nya bioinspirerade tillvägagångssätt. Om dessa test ger positiva resultat, algoritmen som utvecklats av Boyle och hans kollegor kan så småningom användas för att förbättra navigations- och orienteringsstrategierna för robotsvärmar, särskilt när miljöerna de navigerar inte tydligt kartläggs eller definieras.
Obute arbetar nu med att integrera kemotaxi i mer komplexa svärmrobotsystem, både i simuleringar och i några hårdvaruexperiment. Hans sista doktorsexamen project specifically investigates the possibility of using swarm robots for urban litter collection. Boyle, å andra sidan, plans to continue exploring biological strategies that could prove particularly useful for robotics applications.
"För närvarande, I'm interested in applying similar techniques to a major project I'm involved in that aims to develop robot systems for monitoring the integrity of sewer and water distribution networks, " Boyle said.
© 2019 Science X Network