Hybrida obemannade flygfarkoster, eller UAV, är drönare som kombinerar fördelarna med multikoptrar och plan med fasta vingar. Dessa drönare är utrustade för att lyfta och landa vertikalt som multikoptrar, men har också den starka aerodynamiska prestanda och energibesparande kapacitet som traditionella plan. När hybrid-UAV fortsätter att utvecklas, dock, att fjärrstyra dem är fortfarande en utmaning. Kredit:Jie Xu
Hybrida obemannade flygfarkoster, eller UAV, är drönare som kombinerar fördelarna med multikoptrar och plan med fasta vingar. Dessa drönare är utrustade för att lyfta och landa vertikalt som multikoptrar, men har också den starka aerodynamiska prestanda och energibesparande kapacitet som traditionella plan. När hybrid-UAV fortsätter att utvecklas, dock, att fjärrstyra dem är fortfarande en utmaning.
Ett team från Massachusetts Institute of Technologys Computer Science and Artificial Intelligence Lab (CSAIL) har tagit fram ett nytt tillvägagångssätt för att automatiskt designa en lägesfri, modellagnostiker, AI-driven kontroller för alla hybrid-UAV. Teamet kommer att presentera sin nya datorstyrningsdesign på SIGGRAPH 2019, hölls 28 juli-1 augusti i Los Angeles. Denna årliga sammankomst visar upp världens ledande proffs, akademiker, och kreativa hjärnor i framkant av datorgrafik och interaktiva tekniker.
För att kontrollera hybrid-UAV, ett system styr fordonets rotorer av coptermodell för att sväva och ett annat styr rotorer av planmodell för hastighet och avstånd. Verkligen, att kontrollera hybrid-UAV är utmanande på grund av komplexiteten i fordonets flygdynamik. Vanligtvis, regulatorer har designats manuellt och är en tidskrävande process.
I det här arbetet, teamet tog upp hur man automatiskt designar en enda styrenhet för de olika flyglägena (copterläge, glidläge, övergång, etc.) och hur man generaliserar kontrollerdesignmetoden för alla UAV-modeller, form, eller struktur.
"Att designa en styrenhet för en sådan hybriddesign kräver en hög kompetensnivå och är arbetskrävande, " säger Jie Xu från MIT och medförfattare till forskningen. "Med vår designmetod för automatisk styrenhet, alla icke-experter kan mata in sin nya UAV-modell i systemet, vänta några timmar med att beräkna styrenheten, och sedan låta sina egna skräddarsydda UAV:er flyga i luften. Den här plattformen kan göra hybrid-UAV mycket mer tillgänglig för alla."
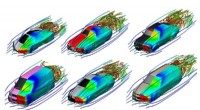
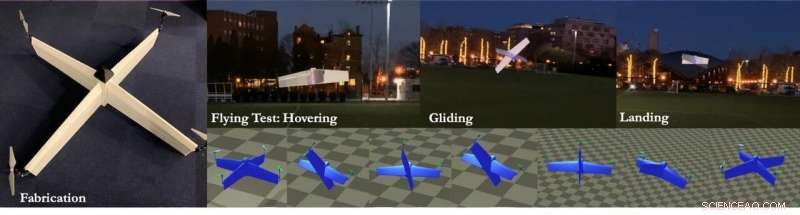
Forskarnas metod består av en neural nätverksbaserad styrenhetsdesign tränad av förstärkningsinlärningstekniker. I deras nya system, användare designar först geometrin hos en hybrid UAV genom att välja och matcha delar från en tillhandahållen datamängd. Designen används sedan i en realistisk simulator för att automatiskt beräkna och testa UAV:s flygprestanda. Förstärkningsinlärningsalgoritm används sedan för att automatiskt lära sig en styrenhet för UAV:en för att uppnå bästa prestanda i högfientlighetssimuleringen. Teamet validerade framgångsrikt sin metod både i simulering och i riktiga flygtester.
Med den fortsatta förekomsten av hybrid-UAV – inom flygindustrin och militärsektorn, till exempel – det finns ett växande behov av att förenkla och automatisera styrenhetsdesign. I det här arbetet, forskarna hade som mål att leverera en ny modellagnostisk metod för att automatisera designen av styrenheter för fordon med mycket olika konfigurationer.
I framtida arbete, teamet avser att undersöka hur man kan öka manövrerbarheten genom förbättrad geometridesign (form, positioner för rotorer/vingar) så att det kan hjälpa till att fullända UAV:s flygprestanda.