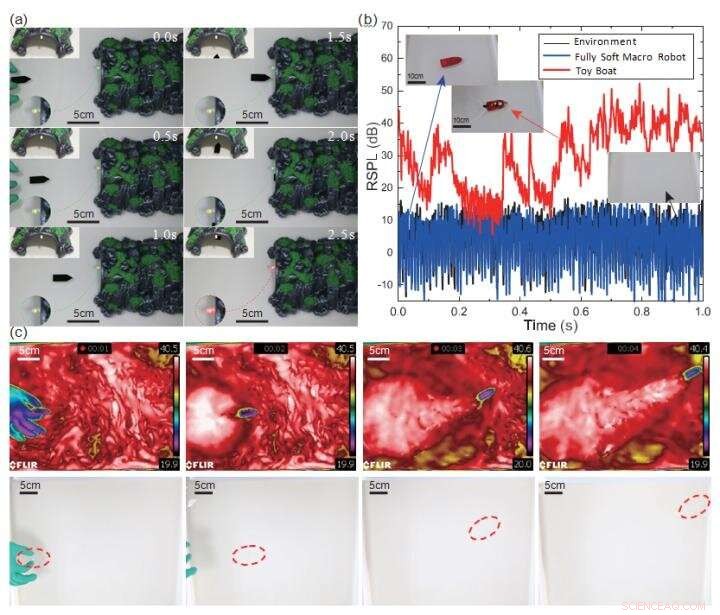
(a) Fotografier av en robot som riktar sig mot en LED-indikerad väg. Inriktningsdemonstrationen visar noggrannheten som robotkontrollen kan uppnå. (b) Jämförelse av den uppmätta relativa brusnivån för en mjuk makrorobot och en batteridriven, leksaksbåt av samma storlek. RSPL anger den relativa ljudtrycksnivån. Roboten uppvisar en mycket lägre ljudnivå jämfört med leksaksbåten. (c) Fotografier av en kall robot som rör sig i varmt vatten tagna med en infraröd videokamera och en vanlig kamera, respektive. Kredit:©Science China Press
Mjuka robotar har fått mycket uppmärksamhet under de senaste åren för sina unika egenskaper jämfört med traditionella stela robotar. Dock, till skillnad från Baymax i filmen "Big Hero 6, "State-of-the-art mjuk robot är bara en prototyp i labb, vanligtvis bundna, vilket innebär att den kräver en elektrisk ledning eller pneumatisk slang för strömförsörjning. För att utnyttja den fulla potentialen hos mjuka robotar, obunden design är att föredra. Befintliga tillvägagångssätt för att utrusta de mjuka robotarna med obunden design involverar vanligtvis kraftkällor med hög energidensitet, vilket leder till integrationsproblem, annars kommer roboten att vara bulk och klumpig för att bära kraftkällor med låg energidensitet.
I naturen finns enorma varelser som har utvecklats i miljarder år för att överleva. Rove skalbaggar i släktet Stenus, en typ av landlevande insekter som lever runt pooler eller bäckar, skulle få en explosion av kinetisk energi för att fly när de av misstag föll på vattnet, genom att utsöndra kemikalier för att generera en ytenergigradient. En sådan framdrivande process, allmänt känd som Marangoni Propulsion, adopterades av levande varelser, så den var mild och mild, helt kompatibel med mjuka material.
I en ny forskningsartikel publicerad i Beijing-baserade National Science Review , forskare vid Huazhong University of Science &Technology rapporterar om en obunden helt mjuk robot i vätska vars aktivering använder miljöenergigradienter. Genom att släppa ut miljöaktiva material (EAM) till den flytande miljön, roboten kunde få en smidig hastighet på 5,5 kroppslängder per sekund, vilket är 7 gånger högre än det bäst rapporterade värdet i den obundna mjuka robotfisken.
"Några fördelar uppstår genom att använda en sådan mekanism, såsom tystnad, ingen termisk trötthet och så vidare." Prof. Zhigang Wu sa, "Mer viktigt, aktiveringen och robotens funktionsförverkligande kan kompletteras separat. Designern, för första gången, får möjlighet att fokusera på funktionsförverkligandet. Detta kan göra det möjligt för den mjuka roboten i vissa orörda scenarier i framtiden."














