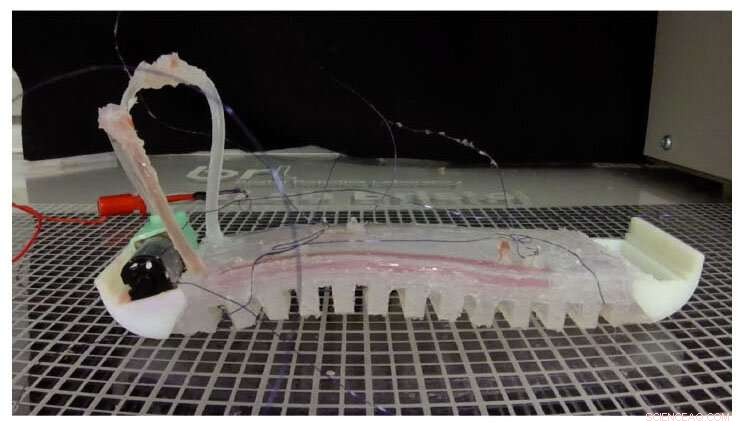
En mjukvara datorstyrd mjukmaskrobot, kan producera tre beteenden. Kredit:Garrad et al., Sci. Robot. 4, eaaw6060 (2019)
Livsliknande robotar som kan fatta beslut, anpassa sig till sin miljö och lära sig, är ett steg närmare tack vare ett team från University of Bristol som har demonstrerat ett nytt sätt att bädda in beräkningar i mjuka robotmaterial. Detta nya framsteg, publiceras i Vetenskapsrobotik , skulle kunna skapa nya robotmöjligheter för miljöövervakning, sanering av föroreningar, drogleverans, proteser, bärbara biosensing och självläkande kompositer.
Än så länge, komplexiteten och utbudet av inlärda beteenden som kan skapas med endast materialbaserade kontrollmetoder har varit begränsade.
Med inspiration från biologi, konceptet Soft Matter Computers (SMCs) syftar till att efterlikna hur kärlsystemet fungerar, där hormoner som adrenalin släpps ut i blodomloppet och sprids i kroppen. När det upptäcks av en receptor, hormoner utlöser då reaktioner i vissa delar av kroppen som ökat blodflöde i flygmusklerna och utvidgning av pupillerna i ögonen.
Nu, forskare från Bristols tekniska fakultet, ledd av professor i robotik Jonathan Rossiter, har framgångsrikt demonstrerat en ny mekanism som gjorde att beräkningar kunde bäddas in i tre mjuka robotar. I tidningen, teamet beskriver hur en ledande vätskereceptor (CFR) är en livskraftig och grundläggande byggsten för en rad SMC:er och nästa generations robotar.
I framtiden, mjuk materia datorer kan spegla denna process genom att översätta information inom strukturen av ett flytande band som går genom robotens mjuka kropp, och detekteras sedan av en lämplig receptor och genererar sedan en utsignal.
Professor Rossiter sa:"Vi har tagit ett viktigt steg mot helt mjuka, autonoma robotar och för smarta material att gå bortom stimulus-respons-relationer som kan möjliggöra intelligenta beteenden som ses i levande organismer. Mjuka robotar kan bli ännu mer verklighetstrogna; kapabla att självständigt anpassa sig till sin miljö och kan visa mångfalden av beteenden som ses i den naturliga världen."

Ett koncept för en helt mjuk, helt autonom geckoformad robot med integrerad mjukmaterieldator (SMC) kontroll. Byggstenen i SMC är den ledande vätskereceptorn (höger). Två elektroder är kopplade i serie med en elektrisk belastning. När ledande vätska injiceras i området mellan dessa elektroder, lasten är påslagen. Kredit:Garrad et al., Sci. Robot. 4, eaaw6060 (2019)
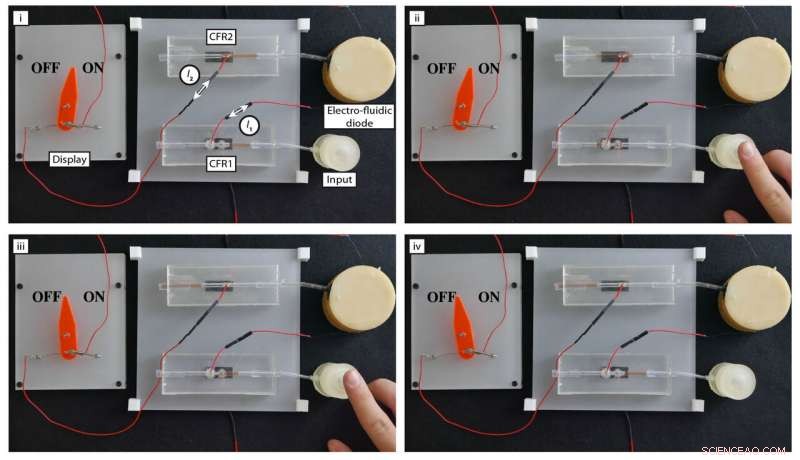
En kompositdator av mjuk materia med två receptorer (CFR1 och CFR2). I i), den mekaniska pumpen är avstängd, vilket betyder att ingången till CFR1 också är avstängd. I ii), den mekaniska ingången är påslagen, ansluter CFR1 och får ström att flyta. Denna ström driver påsmotorn inuti den elektrofluidiska dioden. I iii), trycket som genereras av den elektrofluidiska dioden har fört fram den ledande vätskan bortom CFR2, stänga av displayen. I iv), mekanisk strömbrytare släpps, stänga av CFR1. Utgången förblir avstängd medan vätskan inuti den elektrofluidiska dioden återgår till sitt ursprungliga läge. Kredit:Garrad et al., Sci. Robot. 4, eaaw6060 (2019)