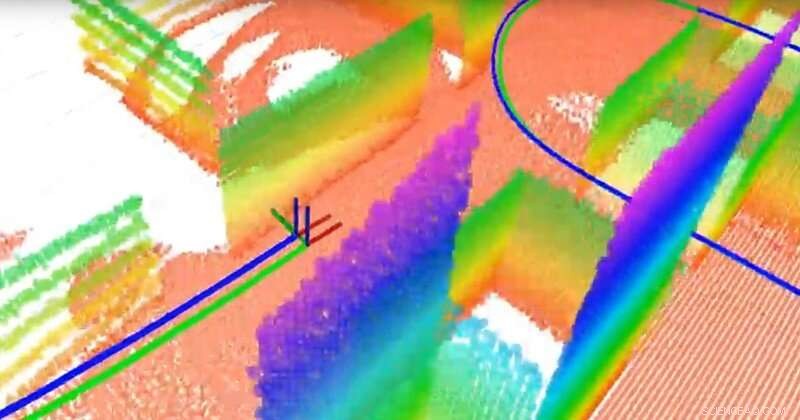
Teamet byggde en 3D-planbaserad karta med hjälp av en 3D-LiDAR och en tröghetssensor. LiDAR är som radar men använder ljus istället för radiovågor. Punkter med olika färger är de olika planen (som fungerar som landmärken för navigering), den gröna linjen är den sanna banan och den blå linjen är den uppskattade banan som beräknas av teamets samtidiga lokalisering och kartläggning (SLAM) algoritm. Kredit:University of Delaware
Forskare runt om i världen tävlar för att utveckla självkörande fordon, men några viktiga komponenter har ännu inte fulländats. En är lokalisering - fordonets förmåga att bestämma dess plats och rörelse. En annan är kartläggning - fordonens förmåga att modellera sin omgivning så att den säkert kan transportera passagerare till rätt plats.
Frågan är:Hur ger du ett fordon en känsla av riktning? Medan GPS -enheter med global positionering kan hjälpa, de är inte tillgängliga eller pålitliga i alla sammanhang. Istället, många experter undersöker samtidig lokalisering och kartläggning, eller SLAM, ett notoriskt svårt problem inom robotik. Nya algoritmer utvecklade av Guoquan (Paul) Huang, en biträdande professor i maskinteknik, el- och datorteknik, och dator- och informationsvetenskap vid University of Delaware, tar svaret närmare.
Huang använder visuellt-tröghetsnavigationssystem som kombinerar tröghetssensorer, som innehåller gyroskop för att bestämma orientering och accelerometrar för att bestämma acceleration, tillsammans med kameror. Använda data från dessa relativt billiga, allmänt tillgängliga komponenter, Huang mäter och beräknar rörelse och lokalisering.
Till exempel, när hans team kopplade sitt system till en bärbar dator och bar det runt UD:s Spencer Laboratory, hem för institutionen för maskinteknik, de genererade tillräckliga data för att kartlägga byggnaden medan de spårade rörelsen på själva den bärbara datorn. I ett autonomt fordon, liknande sensorer och kameror skulle anslutas till en robot i fordonet.
Ett autonomt fordons förmåga att spåra sin egen rörelse och föremålen runt den är kritisk. "Vi måste lokalisera fordonet innan vi automatiskt kan styra fordonet, "sa Huang." Fordonet behöver veta sin plats för att kunna fortsätta. "
Sedan är det frågan om säkerhet. "I ett urbana scenario, till exempel, det finns fotgängare och andra fordon, så helst ska fordonet kunna spåra sin egen rörelse såväl som rörelsen av föremål i rörelse, sa Huang.
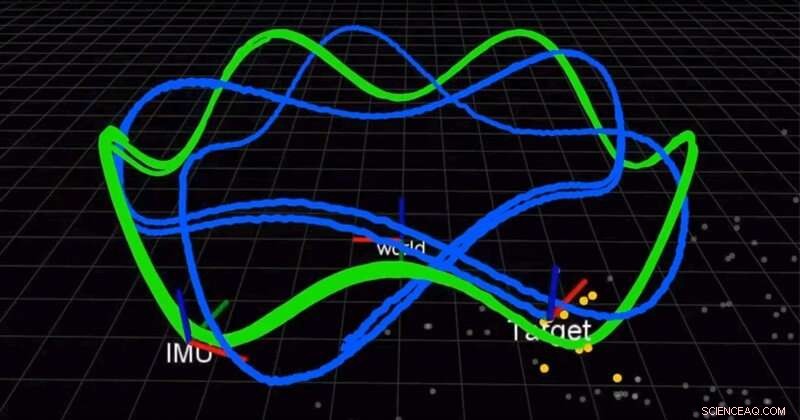
Teamet använder en kamera och en tröghetsmätningsenhet (IMU) för att samtidigt lokalisera en robot och spåra ett rörligt mål. Den gröna linjen är robotens bana och den blå linjen är målets bana. Kredit:University of Delaware
I en artikel publicerad tidigare i år i International Journal of Robotics Research (IJRR), Huang och hans team hittade en bättre, mer exakt lösning för att kombinera tröghetsmätningarna. Tills nu, forskare använde diskret integration, en beräkningsteknik som approximerar området under en kurva, att approximera lösningen. Istället, Huangs grupp hittade en lösning och bevisade att den var bättre än befintliga metoder. Ännu bättre, de delar sin lösning.
"Vi öppnar koden för vår kod. Den finns på GitHub, "sa Huang." Många människor har använt vår kod för sina system. "I en annan ny IJRR -tidning, Huang och hans team omformulerade SLAM -problemet som en formel som beräknar små rörelsesteg från robotarna utrustade med de visuella och tröghetssensorerna. Många av dessa forskningsvideor finns på Huangs lab YouTube -kanal.
Dessa upptäckter kan ha tillämpningar utöver autonoma fordon, från bilar till flygdrönare till undervattensfartyg och mer. Huangs algoritmer kan också användas för att utveckla augmented reality- och virtual reality -applikationer för mobila enheter som smartphones, som redan har kameror och tröghetssensorer ombord.
"Dessa sensorer är mycket vanliga, så de flesta mobila enheter, smartphones, även drönare och fordon har dessa sensorer, "sa Huang." Vi försöker utnyttja de befintliga billiga sensorerna och tillhandahålla en lokaliseringslösning, en lösning för rörelsesspårning. "
2018 och igen 2019, Huang fick ett Google Daydream (AR/VR) Faculty Research Award för att stödja detta arbete.
"Folk ser att robotar kommer att bli nästa stora grej i verkligheten, så det är därför industrin faktiskt driver detta forskningsområde mycket, sa Huang.