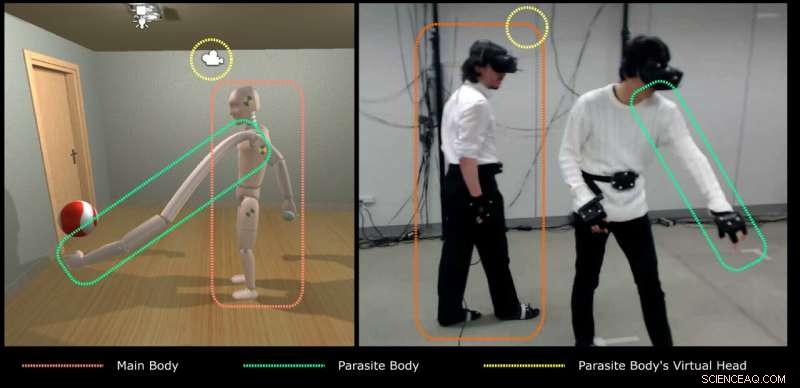
Den parasitära kroppen i två sammanhang. Till vänster, VR-perspektivet. Till höger, det verkliga utrymmet med båda deltagarna. Deltagaren till vänster (indikerad i rött) styr huvuddelen. Deltagaren till höger (markerad i grönt) kontrollerar den parasitära lemmen. Den gula cirkeln anger kamerans position i båda sammanhangen. Kredit:Takizawa et al.
De senaste framstegen inom robotik har möjliggjort utvecklingen av system för att hjälpa människor i en mängd olika uppgifter. En typ av robotsystem som har vunnit stor popularitet under de senaste åren är bärbara robotarmar som fjärrstyrs av en tredje part.
När du hjälper användare, dessa armar måste samla in visuell feedback och dela den med tredjepartsoperatören. Denna feedback kan samlas in på flera sätt, det vanligaste är att placera en kamera på användaren som är värd för robotarmen, även kallad huvudorganoperatör (MBO). Denna speciella metod för att samla in visuell data, dock, kan vara något begränsande, eftersom det är mycket beroende av rörelserna hos användaren som bär systemet.
Med denna begränsning i åtanke, forskare vid Keio universitet, RIKEN AIP och University of Tokyo har nyligen utvecklat ett system för virtuell verklighet (VR) för att undersöka konceptet "kroppsredigering, " som innebär användning av bärbara robotlemmar för att hjälpa människor i dagliga uppgifter. Deras forskning finansierades av Japan Science and Technology Agency (JST) program för Exploratory Research for Advanced Technology (ERATO).
"Det övergripande målet med vårt senaste arbete var att studera kroppsredigering som en del av vår forskargrupp, ERATO JIZAI, " Adrien Verhulst, en av forskarna som genomförde studien, berättade för TechXplore. "Kroppsredigering, som att förlänga kroppen med bärbar assisterande robotteknik, är ett koncept som är lätt att hitta i vissa kulturområden, som i mangaserien Parasyt , av Hitoshi Iwaaki. Vi tänkte för oss själva, 'Att ha en konstgjord varelse fäst vid dig och hjälpa dig är precis vad vi letar efter, ' så vi försökte löst replikera idén i VR."
Verhulst och hans kollegor ville genomföra vad som kunde kallas ett experiment med "delad kropp". Istället för att föreslå en lösning för att övervinna begränsningarna hos nuvarande system för att samla in visuell feedback, de syftar till att jämföra och utvärdera befintliga tillvägagångssätt.
Att göra detta, de utvecklade ett VR-system som använder optitrack-teknik för att spåra en användares kropp och en huvudmonterad display (HMD) för att se riktningen för både MBO:s och robotarmens kroppar. I deras tidning, forskarna hänvisar till robotarmens användare som "huvudkroppen" och till tredje parts teleoperatör som "parasitkroppen".
"Det är logiskt att tro att om "parasitkroppen" är fäst vid huvudkroppen, sedan när huvudkroppen rör sig, parasiten kommer att sluta bli sjuk, eller hur?" sa Verhulst. "Därför, frågorna vi ställde oss själva är:Hur ska vi anpassa den visuella feedback som kroppen samlar in? Skulle det vara en tredje syn, som i videospel? Var ska den sedan placeras:ovanför huvudkroppen, på sidan, eller snarare nära handlingen? Kanske kan vi dela samma syn? Eller en vy som beror på båda människors rörelse?"
Team på olika företag och institutioner har presenterat flera metoder för att samla in visuell feedback från robotarmar. De mest framträdande bland dessa är konceptet "delad syn", tredjepersonsvyn och närbildsvyn.
Som antyds av deras namn, metoden med delad vy samlar in visuell feedback som matchar vad användaren som bär robotarmen ser; tredje personen ser vad en tredje person skulle se om de stod bredvid eller bakom användaren, och när-till-handling-vyn visar en närbild av uppgiften som håller på att slutföras. Forskarna ville undersöka om dessa olika synsätt skulle vara beroende av huvudkroppens rörelse, parasitkroppen, eller båda.
För att utforska denna fråga, de genomförde ett experiment på 16 mänskliga användare med hjälp av VR-systemet de utvecklade. Detta gjorde det möjligt för dem att samla intressanta insikter om olika tillvägagångssätt för insamling av visuell feedback. Ändå, deras resultat är fortfarande preliminära, eftersom antalet personer som deltog i sin studie är begränsat.
"Människor måste känna sig orienterade i riktning mot sin lem för att kunna använda den. Prova detta:Om du sätter en kamera framför dig i en konstig vinkel, och kan bara se dig själv från den kameran, du kommer att ha svårare att flytta armen i en given riktning, ", förklarade Verhulst. "Detta betyder att varje gång huvudkroppen rör sig, parasitens kropp omorienterar sig. Intressant, vi märkte ingen skarp skillnad i kroppsägandepoäng, vilket betyder att oavsett synvinkel, deltagarna kände att de "ägde" sin kropp, och att de hade kontroll över det."
Observationerna som samlats in av Verhulst och hans kollegor tyder på att synsättsberoende inte är så viktigt. Med andra ord, om man samlar in visuell feedback genom att placera en kamera på robotarmen, på den mänskliga användarens axel, eller mittemellan de två, han/hon kan fortfarande uppnå rätt "kroppsägande" när han tittar genom kameran.
"Resultaten vi samlade in var mycket överraskande, " Verhulst tillade. "Vi observerade inte heller några betydande svårigheter när det gäller arbetsbelastning (d.v.s. fysisk belastning, mental belastning, ansträngning, tid), som, på nytt, antyder att kameraberoendet inte spelar någon roll i detta avseende. Dock, deltagarnas prestation var lite bättre i situationer där utsikten beror på både huvudkroppen och parasiten, antyder att för maximal effektivitet, det kan vara bättre att ha kameran placerad på huvuddelen, men vara motoriserad för att följa rörelsen hos personen som styr robotarmen."
Undersökningen som genomfördes av detta team av forskare fokuserade specifikt på perspektivberoendet hos robotarmsoperatörer från tredje part i uppgifter som involverade att hitta och nå objekt. I framtiden, VR-systemet de utvecklade skulle också kunna användas för att studera metoder för att samla in visuell feedback på mer utarbetade och realistiska uppgifter.
"Nästa steg är att skapa en experimentell miljö med mer realistiska situationer och konfigurationer, "Ryo Takizawa, en annan forskare involverad i studien, berättade för TechXplore. "För att utforska samarbetsmetoder i samarbete, vi funderar på att begränsa kommunikationsmetoder och förbättra VR-modeller, och så vidare."
Forskarna bestämde sig för att använda VR och genomföra ett virtuellt experiment eftersom det var en enkel och billig lösning som inte krävde underhåll av avancerade robotsystem. För att fastställa giltigheten av deras resultat, dock, de kommer så småningom att behöva jämföra sina resultat med de som uppnås med en riktig robotarm.
I deras framtida arbete, Verhulst och hans kollegor planerar också att genomföra ett liknande experiment där deltagarna tränas i uppgiften de ska slutföra i förväg, eftersom de tror att detta skulle leda till olika resultat. I den här studien, faktiskt, användarna fick ingen tidigare utbildning innan de använde sin VR-plattform.
"Vi måste överväga hur man utformar en träningsuppgift eller ett träningsprogram i ett kroppsredigerat och delat kroppssammanhang, speciellt när det gäller hur man slätar över, om inte förbättra, samarbetsuppgifter, "Katie Seaborn, en annan forskare som var involverad i studien, berättade för TechXplore. "Jag har utforskat idén om samtidigt, synkronisering med samma rörelse, som har kopplats till lyft i samarbetsprestationer i andra sammanhang. Vi undrar om en sådan strategi för "delad handling" skulle fungera i det här fallet, med två personer som delar en mycket ovanlig kropp i VR."
© 2019 Science X Network