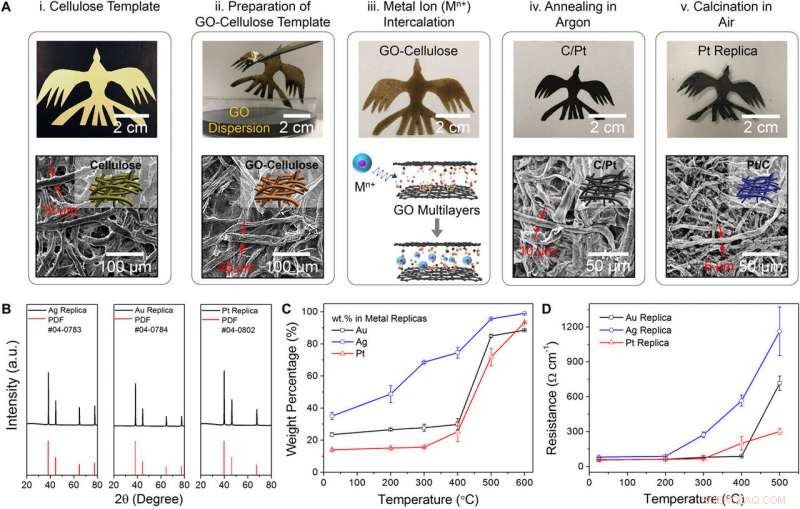
GO-aktiverad schablonsyntes av ädelmetallkopior.(A) Den GO-aktiverade schablonsyntesen för att omvandla cellulosapapper till ädelmetallkopior. Syntesen av en fenixformad Pt-replika demonstreras. SEM-bilderna visade att nätverksmorfologierna för cellulosapapper och GO-cellulosamallen var mycket lika. Mikrofibrernas diameter minskade från ~20 till ~6 μm efter tvåstegsglödgning/kalcinering. (B) XRD (röntgendiffraktion) spektra av syntetiserade metallkopior efter tvåstegs glödgning/kalcinering. Spektran överensstämde med deras motsvarande "pulverdiffraktionsfiler (PDF)" från "gemensamma kommittén för pulverdiffraktionsstandarder." (C) Viktprocenthalter av metallinnehåll i de mallade replikerna efter kalcinering i luft vid olika temperaturer. Viktprocenten bestäms genom EDS-analys (energy dispersive x-ray spectroscopy). (D) Motstånd hos mallade metallkopior (över 1 cm) efter kalcinering i luft vid olika temperaturer. Felstaplarna indikerar skillnaderna i mätningar från fyra prover. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
Origami-robotar kan formas genom att tätt integrera flera aktiveringsfunktioner, avkänning och kommunikation. Men uppgiften är utmanande eftersom konventionella material inklusive plast och papper som används för sådana robotkonstruktioner sätter begränsningar för att begränsa tilläggsfunktioner. För att installera multifunktionaliteter i systemet måste forskare vanligtvis inkludera extern elektronik som ökar robotens vikt. I en nyligen publicerad studie nu publicerad på Vetenskapsrobotik , Haitao Yang och kollegor vid de tvärvetenskapliga avdelningarna för kemi och biomolekylär teknik, Biomedicinsk teknik och elektro- och datorteknik i USA och Singapore utvecklade en grafenoxid (GO)-aktiverad mallsyntesprocess för att producera omkonfigurerbara, kompatibla och multifunktionella metalliska ryggrader. Stommen utgjorde grunden för origamirobotar i kombination med inbyggd belastningsavkänning och trådlös kommunikationskapacitet. Med GO-metoden, forskarna bildade komplexa ädelmetallorigamis som strukturella replikeringar av pappersmallar.
Forskargruppen kunde reproducera platinaorigamistrukturer som gjorts stabila med tunna elastomerer för att bilda multifunktionella ryggrader för att skapa de nya origamirobotarna. De nya robotarna var mer deformerbara, brandhämmande och strömsnåla än de som är byggda med andra material. Yang et al. observerade ytterligare funktioner för de nya platinarobotarna (Pt-robotar) inklusive resistiv uppvärmning på begäran, belastningsavkänning och inbyggda antenner utan extern elektronik. För ytterligare funktioner, de inkluderade övervakning eller registrering av robotrörelser i realtid, trådlös kommunikation mellan robotar, värmereglering och magnetisk styrning. Det nya verket berikade robotmaterialbiblioteket för att konstruera mångsidiga mjuka robotar.
Forskare inom robotik hade tidigare utforskat den urgamla japanska konsten origami för att konstruera konstgjorda muskler, självvikningsmaskiner, vårorigamisystem och robotmetamorfos. Konventionellt, de använde cellulosapapper, polyester, polyeter-eterketon och polytetrafluoreten för att tillverka ryggrader för sådana uppfinningar. Trots det mekaniska stödet som erbjuds, ryggraden av papper eller plast saknade funktioner för stimulirespons, avkänning och trådlös kommunikation. Istället för att installera extern utrustning för att leverera sådana funktioner, forskarlag siktar nu på att utveckla multifunktionella mjuka robotryggrader för tät integration. Forskningsinsatser har ännu inte visat sådana prototypiska mjuka robotar med ledande origami-ryggrad med avkännings- och kommunikationspotential. Som ett resultat, forskare är angelägna om att utveckla ett nytt tillverkningssystem för att producera mekaniskt stabila, mjuka och ledande robotiska ryggrader.
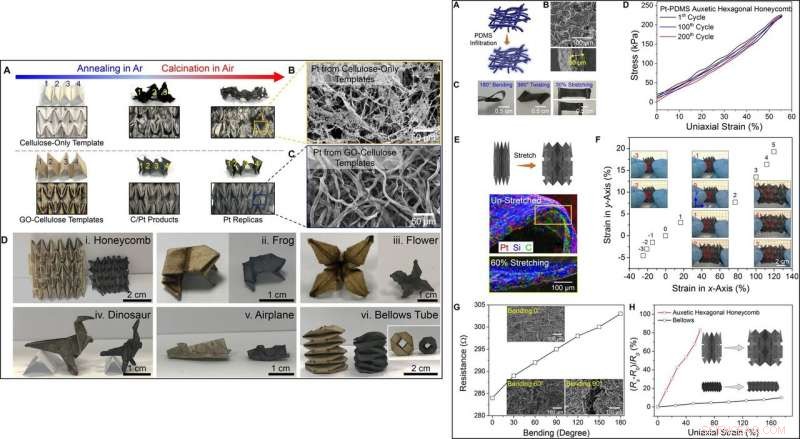
VÄNSTER:Tillverkning av metallorigamistrukturer. (A) Foton av de fyrfaldiga och auxetiska hexagonala metallorigamiprodukterna syntetiserade från endast cellulosa (översta raden) och GO-cellulosamallar (nedre raden). Pt-baserade produkter i olika glödgnings-/kalcineringsstadier visas. SEM-bilder av Pt-produkter syntetiserade från (B) cellulosamallar och (C) GO-cellulosamallar. (D) Foton av GO-cellulosaorigami och förminskade Pt-origamikopior enligt mall, inklusive (i) honungskaka, (ii) groda, (iii) blomma, (iv) dinosaurie, (v) flygplan, och (vi) bälgrör. HÖGER:Förvandlar Pt-origami-kopior till deformerbara Pt-elastomer-metamaterial. (A) Infiltration av utspädd elastomervätska i mallade Pt-repliker möjliggör tillverkning av Pt-elastomer-metamaterial. (B) Top-down och tvärsnitts SEM-bilder av Pt-elastomer komposit. Tjockleken på Pt-elastomerkomposit är cirka 90 μm. (C) Stor deformerbarhet av en plan Pt-elastomer tunn film (180° böjning, 360° vridning, och 30 % stretching). (D) Stress-töjningskurvor för en Pt-elastomer auxetic hexagonal origami under stabilitetstestet under 200 cykler. (E) In situ SEM-bilder med EDS-mappning av ett Pt-elastomerveck under 90 % enaxlig sträckning. (F) Mönstren för Pt-elastomer auxetic hexagonal origami är töjningsberoende under den enaxliga komprimeringen (markerad med -1 till -3) och sträckningsprocesser (markerade med 1 till 5). Siffran markerad med 0 representerade initialtillståndet. (G) Resistansförändringar hos en platt Pt-elastomerfilm under böjning från 0° till 180°. (H) Relativa motståndsförändringar av auxetic hexagonal och bälg Pt-elastomer origamis under olika uniaxial stammar. Rs är motståndet hos Pt-elastomer origami under enaxliga stammar; R0 är motståndet hos osmält Pt-elastomer origami. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
Under tillverkningsprocessen, Yang et al. använde grafenoxid (GO) flerskikt för att interkalera en mängd olika metalljonprekursorer, följt av högtemperaturglödgning och kalcinering för att producera de högdimensionella GO-strukturerna. Metalloxidreplikan inkluderade mikrotexturer, fristående strängar och komplexa origamistrukturer med utmärkt kemisk kontroll och strukturell replikering. Den föreslagna GO-härledda metoden kommer att tillhandahålla en ny plattform för att producera komplexa metalliska arkitekturer som multifunktionella ryggraden för mjuka robotar.
Yang et al. konverterade cellulosapappersfilmerna eller origamiformerna till en mängd olika metallkopior med den GO-aktiverade mallprocessen. De följde fyra huvudsteg under tillverkningsprocessen som började med en fenixformad mall för att bilda ädelmetallsalt (Mn) + GO-cellulosakomplex (M-GO-cellulosa). De resulterande metallkopiorna genomgick ytterligare glödgnings- och kalcineringsprocesser under tillverkningen och forskargruppen kontrollerade dem genom att justera deras kalcineringstemperatur. Forskarna skapade komplexa metalliska origamistrukturer som hexagonala bikakor, grodor, blommor, dinosaurier, flygplan och bälgar genom att omvandla olika 3D-origamistrukturer från cellulosapappersform till platinametall.
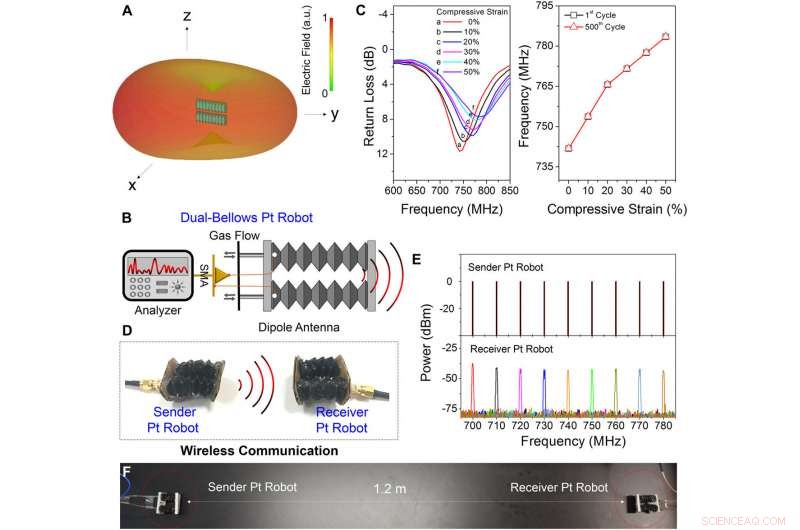
Origami Pt-robot med inbyggda trådlösa kommunikationsmöjligheter. (A) Simulerade 3D-strålningsmönster för två Pt-elastomerbälgrör vid 741,8 MHz under 0 % töjning. (B) Schematisk demonstration av en dubbelbälg Pt-robot, som också fungerade som en omkonfigurerbar dipolantenn. (C) Vänster:Returförlust av den omkonfigurerbara dipolantennen under olika kompressionspåkänningar från 0 till 50 %. Höger:Resonansfrekvenserna är en funktion av trycktöjningar före och efter 500-cyklers robotaktiveringar. (D) Fotografi av en avsändare Pt-robot (sänder signaler) (vänster) och en mottagare Pt-robot (mottagning av signaler) (höger). (E) Pulssignalerna (sändaren Pt-roboten skickade) mottogs väl av mottagarens Pt-robot. Frekvensen av skickade signaler var identisk med de mottagna signalerna. (F) Två Pt-robotar kunde kommunicera på distans över 1,2 m avstånd. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
För att förbättra den mekaniska stabiliteten, de inkluderade tunna elastomerer till metallorigamistrukturerna för stor deformerbarhet och reversibel omkonfiguration. Yang et al. valde platinametall på grund av dess effektiva strukturella bevarande, hög mekanisk flexibilitet och hög elektrisk ledningsförmåga jämfört med guld (Au) eller silver (Ag). Teamet optimerade Pt-elastomer-ryggraden för hög elektrisk konduktivitet och mekanisk flexibilitet, för att den resulterande plana Pt-elastomerkompositen ska upprätthålla stora och upprepade deformationer – idealiskt för mjuka robotryggrader. De omkonfigurerbara metalliska ryggraden introducerade flera och distinkta funktioner för att bilda metamaterial-origamirobotar inklusive inneboende potential för brandmotstånd. Forskargruppen testade denna funktion genom att tillåta Pt-robotar att upprätthålla direktkontakt med en låga för långvarig exponering (800 0 C i 30 sekunder), i jämförelse tändes en pappersrobot på sekunder (mindre än 5 sekunder).
Pt-elastomer-ryggraden var tunnare och lättare än cellulosapappersrobotarna men förblev mekaniskt stabil under reversibel robotaktivering. Den pappersbaserade roboten krävde stora tryckförändringar för att förlänga eller dra ihop sig; medan Pt-roboten bara krävde lägre tryckförändringar. Yang et al. utvecklade sedan den ledande Pt-origamiroboten för att skicka och ta emot elektromagnetiska (EM) vågor och fungera som en omkonfigurerbar antenn för trådlös kommunikation. Före tillverkningen, forskargruppen simulerade 3D-strålningsmönster för att utforska användningen av Pt-robotar som strålningsantenner och tillverkade dem därefter. Forskarna visade också trådlös kommunikation mellan två Pt-robotar som fungerade som sändare och mottagare. När en avsändarrobot skickade pulssignaler vid olika frekvenser, mottagarroboten stationerad 1,2 m bort tog emot dem utan frekvensavvikelse mellan de skickade och mottagna signalerna.
Jämförelse av gastrycket mellan papper och Pt-robotar. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
Teamet jämförde fem kategorier av robotfunktioner i arbetet för att demonstrera tekniska fördelar med att använda de GO-aktiverade Pt metalliska ryggraden i förhållande till (1) ryggradsdensitet, (2) mekanisk styvhet, (3) energieffektivitet, (4) belastningsavkänningskapacitet och (5) trådlös kommunikationskapacitet. Forskargruppen optimerade ytterligare de två Pt-robotarna för trådlös kommunikation, där en avsändarrobot trådlöst levererade navigationsinstruktioner till en mottagarrobot för att lyckas kringgå ett konstruerat hinder genom att följa en guidad väg.
Teamet utökade sedan applikationerna av systemet med hjälp av additiv 3D-tillverkning, där de kombinerade Pt-Go-cellulosabläck med fused deposition modeling (FDM) för att 3-D-printa metalliska robotformade ryggradsformade former. Senare, de konstruerade Pt-robotar för fjärrstyrning med magnetfält. För detta, Yang et al. syntetiserade en Pt-replika med Pt-Go-cellulosabläck och infiltrerade polymerlösningen med magnetiska partiklar för att skapa en magnetisk Pt-ryggrad. De nya strukturerna innehöll de vanliga inbyggda spänningsavkänningarna och funktionerna för trådlös kommunikation, med extra magnetisk rörelse. De magnetiska Pt-robotarna kunde genomgå reversibel form- och kroppsomvandling under magnetisk aktivering för att röra sig framåt i linje med roterande magnetfält.
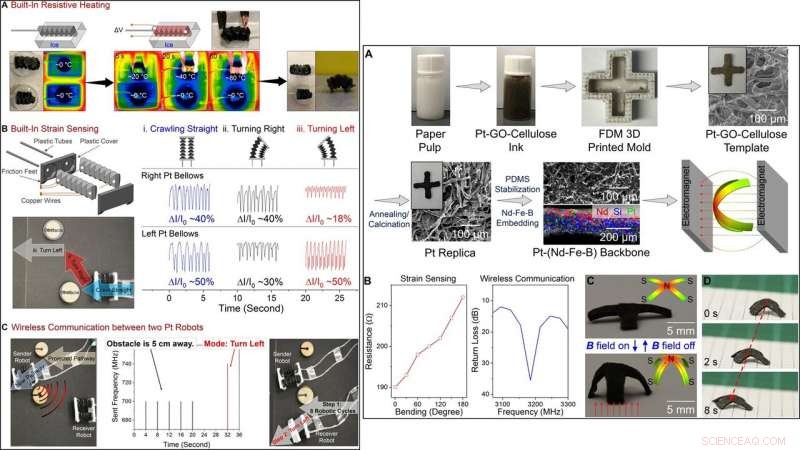
VÄNSTER:Demonstrationer av multifunktionella Pt-robotar. (A) Enkelbälg Pt-robot med inbyggd resistiv värmekapacitet. Två Pt-robotar frystes i isbitar. Under en pålagd spänning på 20 V, den övre Pt-roboten värmdes snabbt upp till ca. 80°C på 60 s, flydde från isen, och fortsatte att krypa fram. (B) Pt-robot med dubbla bälgar med inbyggd spänningsavkänningsförmåga. Pt-robotryggraden var anslutna med koppartrådar, och anslutningen fixades med silverpasta. Den föreslagna vägen för Pt-roboten med dubbla bälgar innebar (i) att krypa rakt, (ii) sväng höger, och (iii) sväng vänster. Robotaktiveringarna längs hela vägen övervakades genom att läsa de nuvarande profilerna för vänster och höger Pt-bälgrör. (C) Trådlös kommunikation mellan två Pt-robotar med dubbla bälgar. Avsändarroboten blockerades av ett hinder på den projicerade vägen och svängdes åt vänster för att kringgå hindret. Avsändarroboten skickade en serie signaler till mottagarroboten. Signalerna tolkades sedan till den rörliga riktlinjen för mottagarroboten, gör det möjligt för roboten att ta den föreslagna vägen utan att stöta på hindret. HÖGER:Tillverkning av magnetiskt aktiverad Pt-robot med Pt-GO-cellulosabläck. (A) Alternativ tillverkning av Pt-robotar demonstrerades genom att utveckla Pt-GO-cellulosabläck och integrera med FDM 3D-utskrift. Efter tvåstegsglödgning/kalcinering, PDMS stabilisering, och inbäddning med Nd–Fe–B-partiklar, en magnetiskt aktiverad Pt-(Nd-Fe-B) tetrapod-robot tillverkades. (B) Inbyggd belastningsavkänning och trådlös kommunikationskapacitet hos Pt–(Nd–Fe–B) tetrapodrobot. (C) Pt-(Nd-Fe-B) tetrapod-robot välvd upp och ner under magnetiska påverkningar. (D) Pt–(Nd–Fe–B) tetrapodrobot flyttade sig framåt genom att följa banorna för roterande magnetfält. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
På det här sättet, Haitao Yang och kollegor utvecklade ett Go-aktiverat mallsyntesprotokoll för att producera omkonfigurerbara, kompatibla och multifunktionella metalliska ryggrader för att bygga metalliska origamirobotar. Robotarna innehöll inbyggd belastningsavkänning och trådlös kommunikation. De syntetiska metalliska ryggraderna gjorda av komplexa ädelmetaller inklusive silver, guld och platina var höga strukturella replikationer av sina pappersmotsvarigheter. Jämfört med traditionellt papper och plast, de omkonfigurerbara Pt-elastomer ryggraden erbjöd låg vikt, deformerbarhet och energieffektivitet. Yang et al. föreställ dig praktiska tillämpningar för metalliska origamirobotar, allt från aktiviteter i högriskmiljöer, för användning i konstgjorda muskler och robotarmar, och som fjärrstyrda obundna robotar. De syftar till att optimera metalliska ryggrader med elektrokemiskt aktiva material för att bilda energilagringsenheter nästa. Sådan utveckling kommer att berika robotmaterialbiblioteket för att tillverka olika mjuka robotar med högfunktionell integration.
© 2019 Science X Network