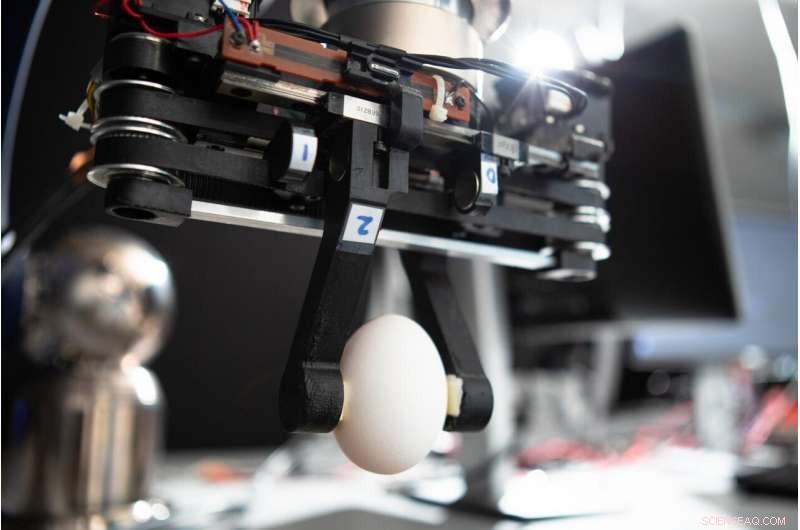
En robotgripare utvecklad i labbet vid University at Buffalo ingenjör Ehsan Esfahani använder repulsion mellan magneter för att justera styvheten i dess grepp, förbättra säkerheten. Kredit:Douglas Levere/University at Buffalo
Människohänder är anmärkningsvärt skickliga på att manipulera en rad föremål. Vi kan plocka upp ett ägg eller en jordgubbe utan att krossa det. Vi kan slå en spik.
En egenskap som gör att vi kan utföra en mängd olika uppgifter är förmågan att ändra fastheten i vårt grepp, och University at Buffalo-ingenjörer har utvecklat en tvåfingrad robothand som delar denna egenskap.
Robothandens design gör att den kan absorbera energi från stötar vid kollisioner. Detta förhindrar att allt som roboten håller i går sönder, och gör det också säkrare för människor att arbeta med och nära maskinerna.
Sådana gripdon skulle vara en värdefull tillgång för partnerskap mellan människa och robot i löpande band inom fordonsindustrin, elektronisk förpackning och andra industrier, säger Ehsan Esfahani, Ph.D., docent i maskin- och flygteknik vid UB School of Engineering and Applied Sciences.
"Vår robotgripare efterliknar den mänskliga handens förmåga att justera styvheten i greppet. Dessa gripdon är designade för kollaborativa robotar som arbetar tillsammans med människor, " Esfahani säger. "De kommer att vara hjälpare, så de måste vara säkra, och gripdon med variabel styvhet hjälper till att uppnå det målet."
En ny studie publicerad online den 10 september in IEEE-transaktioner på industriell elektronik framhäver enhetens säkra design, inklusive genom experiment som visar hur griparens stötdämpande funktioner hindrar en spagettisticka från att gå sönder under en kollision.
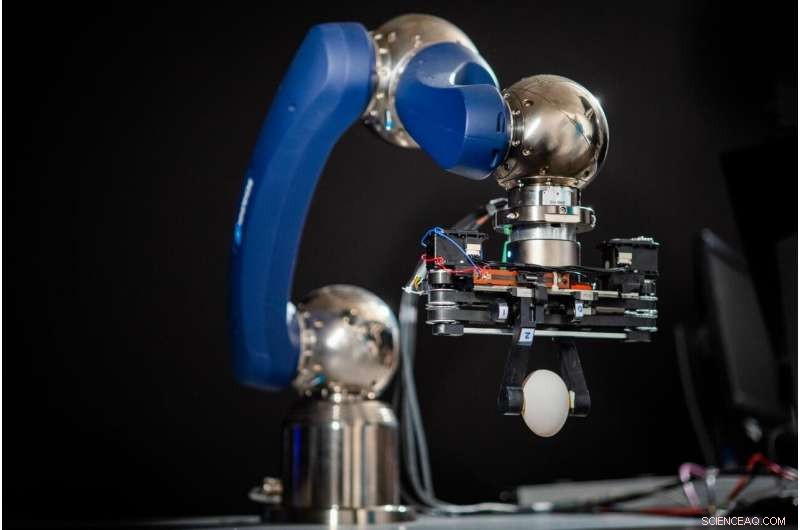
En robotgripare utvecklad i labbet vid University at Buffalo ingenjör Ehsan Esfahani. Griparen är fäst vid en kommersiellt tillgänglig robotarm. Kredit:Douglas Levere/University at Buffalo
Magneter ger denna robot en mjuk touch
Esfahani förklarar att magneter är hemligheten bakom robotgriparens mångsidighet.
Istället för att ha två fingrar som är fixerade på plats, var och en av griparens fingrar har en magnetisk bas som sitter mellan två neodymmagneter som stöter bort, eller trycka emot, fingret.
Luftgapet mellan magneterna fungerar som en fjäder, skapar en liten giv när handen tar upp ett föremål eller kolliderar med en yttre kraft. Styvheten på greppet kan också justeras genom att öka eller minska avståndet mellan magneterna.
I den nya tidningen, Esfahani och Amirhossein Memar, en före detta UB Ph.D. kandidat inom maskin- och rymdteknik, rapportera om dessa säkerhetsfunktioner.
I en uppsättning tester, ingenjörerna placerade en kort spagettistav på längden mellan robothandens fingrar. När griparen kraschade in i ett fast föremål, enheten detekterade den externa kraft som applicerades, vilket fick magneterna att justera sin position, tillfälligt minska styvheten i greppet och låta griparen absorbera en del av energin från kollisionen.
Slutresultatet? Spagettistaven stannade i ett stycke.
Nästa steg i utvecklingen
Esfahani noterar att gripdonet som hans team håller på att utveckla kan fästas på kommersiellt tillgängliga robotarmar som redan används i många anläggningar. Detta kan sänka kostnaden för att anpassa tekniken för företag som är intresserade av att förbättra säkerheten och kapaciteten hos befintliga maskiner.
Esfahani lanserar ett startup-företag för att kommersialisera griparen, licensieringsteknik från UB.
Hans lag har fått $55, 000 från Buffalo Fund:Accelerator – finansierad av Innovation Hub, som administreras av UB och stöds av Empire State Development — för att vidareutveckla robothanden. Förutom att förfina griparens nuvarande design, teamet kan också utforska framsteg som att lägga till ett tredje finger.
Forskare som varit med och designat och testat gripdonet är bland annat Ph.D. student Sri Sadhan Jujjavarapu och Memar, medförfattaren till den nya spagettistavstudien, som har fått sin doktorsexamen. från UB och är nu postdoktor vid Facebook Reality Labs.














