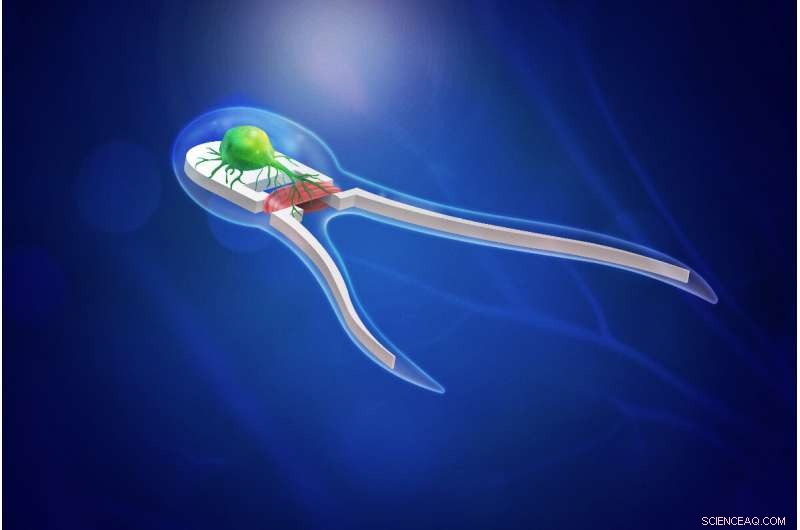
Konstnärsframställning av en ny generation biobotar -- mjuka robotenheter som drivs av skelettmuskelvävnad stimulerad av motorneuroner ombord. Kredit:Michael Vincent
Forskare har utvecklat mjuka robotenheter som drivs av neuromuskulär vävnad som utlöser när de stimuleras av ljus – vilket tar mekanik ett steg närmare utvecklingen av autonoma biobotar.
Under 2014, forskarlag ledda av mekanisk vetenskap och ingenjörsprofessor Taher Saif och bioteknikprofessor Rashid Bashir vid University of Illinois arbetade tillsammans för att utveckla de första självgående biohybrid-biobotarna för simning och promenader som drivs av att slå hjärtmuskelceller från råttor.
"Vår första simmarstudie visade framgångsrikt att bots, modellerad efter spermier, kunde faktiskt simma, " Saif sa. "Denna generation av enkelstjärtade robotar använde hjärtvävnad som slår av sig själv, men de kunde inte känna av miljön eller fatta några beslut."
I en ny studie publicerad i Proceedings of the National Academy of Sciences och leds av Saif, forskarna visar en ny generation av tvåsvansade robotar som drivs av skelettmuskelvävnad stimulerad av motorneuroner ombord. Neuronerna har optogenetiska egenskaper:Vid exponering för ljus, neuronerna kommer att skjuta för att aktivera musklerna.
"Vi tillämpade en optogenetisk neuroncellkultur, härrör från musstamceller, intill muskelvävnaden, " Saif sa. "Neuronerna avancerade mot muskeln och bildade neuromuskulära förbindelser, och simmaren samlades på egen hand."
Efter att ha bekräftat att den neuromuskulära vävnaden var kompatibel med deras syntetiska biobotskelett, laget arbetade för att optimera simmarens förmågor.
I forskargruppen ingår bl. från vänster, professor Taher Saif, doktorand Onur Aydin, doktorand Xiastian Zhang, professor Mattia Gazzola, doktorand Gelson J. Pagan-Diaz, sittande, och professor och dekanus vid Grainger College of Engineering, Rashid Bashir. Kredit:L. Brian Stauffer
"Vi använde beräkningsmodeller, ledd av mekanisk vetenskap och ingenjörsprofessor Mattia Gazzola, för att avgöra vilka fysiska egenskaper som skulle leda till den snabbaste och mest effektiva simningen, Saif sa. "Till exempel, vi tittade på variationer i antalet svansar och svanslängder för den mest effektiva designen av biohybridsimmaren."
"Med tanke på det faktum att biologiska ställdon, eller biobotar, är inte lika mogna som andra tekniker, de är oförmögna att producera stora krafter. Detta gör deras rörelse svår att kontrollera, ", sa Gazzola. "Det är mycket viktigt att noggrant designa ställningen som biobotarna växer runt och interagerar med för att få ut det mesta av tekniken och uppnå lokomotivfunktioner. Datorsimuleringarna vi kör spelar en avgörande roll i denna uppgift eftersom vi kan spänna över ett antal möjliga konstruktioner och bara välja ut de mest lovande för testning i verkligheten."
"Förmågan att driva muskelaktivitet med neuroner banar väg för ytterligare integration av neurala enheter inom biohybridsystem, Saif sa. "Med tanke på vår förståelse av neural kontroll hos djur, det kan vara möjligt att gå vidare med biohybrid neuromuskulär design genom att använda en hierarkisk organisation av neurala nätverk."
Saif sa att han och hans team föreställer sig detta framsteg som leder till utvecklingen av flercellskonstruerade levande system med förmågan att svara intelligent på miljösignaler för tillämpningar inom bioteknik, medicin och självläkande materialteknik.
Dock, teamet erkänner att – liksom levande organismer – kommer inga två biohybridmaskiner att utvecklas till att bli exakt likadana.
"Precis som tvillingar inte är riktigt identiska, två maskiner utformade för att utföra samma funktion kommer inte att vara samma, Saif sa. "Den ena kan röra sig snabbare eller läka från skada annorlunda än den andra - en unik egenskap hos levande maskiner."