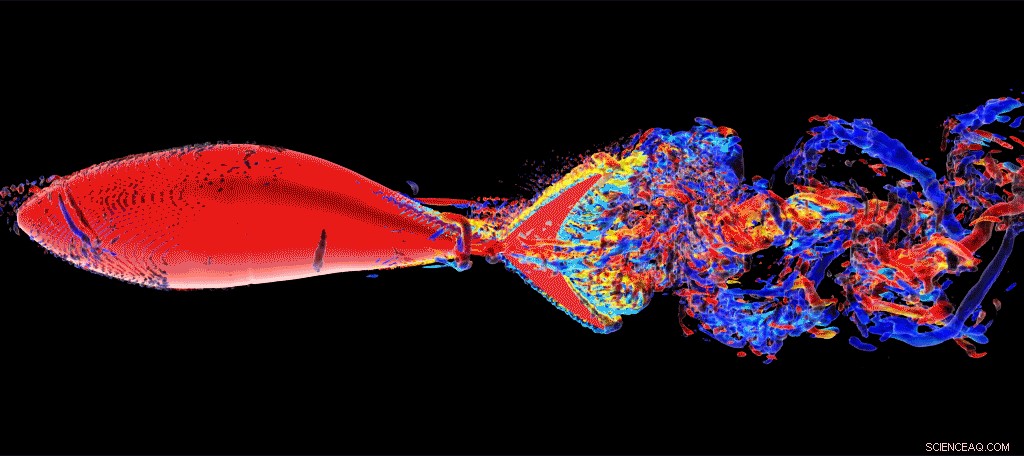
Utveckling av en högfrekvent experimentell plattform som utforskar prestationsutrymmet för simfiskar. Kredit:Haibo Dong
Maskiningenjörer vid University of Virginia School of Engineering, leda ett samarbete med biologer från Harvard University, har skapat den första robotfisken som visat sig efterlikna hastigheten och rörelserna hos levande gulfenad tonfisk.
Deras peer-reviewed papper, "Tuna robotics:en högfrekvent experimentell plattform som utforskar prestationsutrymmet för simmande fiskar, " publicerades 18 september, 2019, i Vetenskapsrobotik .
Leds av Hilary Bart-Smith, professor vid UVA Engineerings institution för maskin- och rymdteknik, robottonfiskprojektet föddes ur ett femårigt, 7,2 miljoner dollar multidisciplinärt universitetsforskningsinitiativ, US Office of Naval Research tilldelade Bart-Smith att studera snabbt, effektiv simning av olika fiskar. Syftet med Bart-Smiths projekt är att bättre förstå fysiken kring fiskens framdrivning, forskning som så småningom skulle kunna informera utvecklingen av nästa generation av undervattensfordon, drivs av fiskliknande system bättre än propellrar.
Undervattensrobotar är också användbara i en rad applikationer, som försvar, utforskning av marina resurser, infrastrukturinspektion och rekreation.
Långt innan bioinspirerade framdrivningssystem kan bli livskraftiga för allmän och kommersiell användning i bemannade och obemannade fordon, dock, forskare måste på ett tillförlitligt sätt kunna förstå hur fiskar och andra varelser rör sig genom vattnet.
"Vårt mål var inte bara att bygga en robot. Vi ville verkligen förstå vetenskapen om biologisk simning, ", sa Bart-Smith. "Vårt mål var att bygga något som vi kunde testa hypoteser på i termer av vad som gör biologiska simmare så snabba och effektiva."
Teamet behövde först studera den biologiska mekaniken hos högpresterande simmare. Harvard-biologiprofessorn George V. Lauder och hans team av forskare mätte exakt simdynamiken hos gulfenad tonfisk och makrill. Med hjälp av dessa uppgifter, Bart-Smith och hennes team, forskaren Jianzhong "Joe" Zhu och Ph.D. student Carl White, konstruerade en robot som inte bara rörde sig som en fisk under vattnet utan slog sin svans tillräckligt snabbt för att nå nästan motsvarande hastigheter.
De jämförde sedan roboten som de döpte till "Tunabot" med levande exemplar.
"Det finns många papper om fiskrobotar, men de flesta av dem har inte mycket biologiska data i sig. Så jag tror att detta papper är unikt i kvaliteten på både robotarbetet och de biologiska data som är sammanförda till ett papper, sa Lauder.
"Det som är så fantastiskt med de resultat vi presenterar i tidningen är likheterna mellan biologi och robotplattformen, inte bara när det gäller simkinematik, men också när det gäller förhållandet mellan hastighet och tail-beat-frekvens och energiprestanda, Bart-Smith sa. "Dessa jämförelser ger oss förtroende för vår plattform och dess förmåga att hjälpa oss att förstå mer om fysiken i biologisk simning."
Teamets arbete bygger på UVA Engineerings styrkor inom autonoma system. Institutionen för maskin- och rymdteknik är deltagare i UVA Engineerings Link Lab för cyberfysiska system, som fokuserar på smarta städer, smart hälsa och autonoma system, inklusive autonoma fordon.
Tunabot-projektet är en utväxt av Bart-Smiths andra, mycket konkurrenskraftigt multidisciplinärt universitetsforskningsinitiativ från Office of Naval Research; 2008, Bart-Smith fick ett pris på 6,5 miljoner dollar för att utveckla en undervattensrobot efter en mantor.
Testerna av Tunabot äger rum i ett stort labb i Mechanical and Aerospace Engineering Building vid UVA Engineering, i en flödestank som tar upp ungefär en fjärdedel av rummet, och vid Harvard University i en liknande anläggning. Den ögonlösa, finlös replikfisk är ungefär 10 tum lång; den biologiska motsvarigheten kan bli upp till sju fot lång. En fiskelina håller roboten stadig, medan ett grönt laserljus skär över plastfiskens mittlinje. Lasern mäter vätskerörelsen av roboten med varje svep av dess tillverkade svans. När vattenströmmen i flödestanken ökar, Tunabotens svans och hela kropp rör sig i ett snabbt böjningsmönster, liknande sättet som en levande gulfenad tonfisk simmar.
"Vi ser i fiskrobotlitteraturen hittills att det finns riktigt bra system som andra har gjort, men uppgifterna är ofta inkonsekventa när det gäller val av mätning och presentation. Det är bara det aktuella tillståndet för robotteknikområdet för tillfället. Vår uppsats om Tunabot är betydelsefull eftersom vår omfattande prestandadata sätter ribban väldigt högt, " sa White.
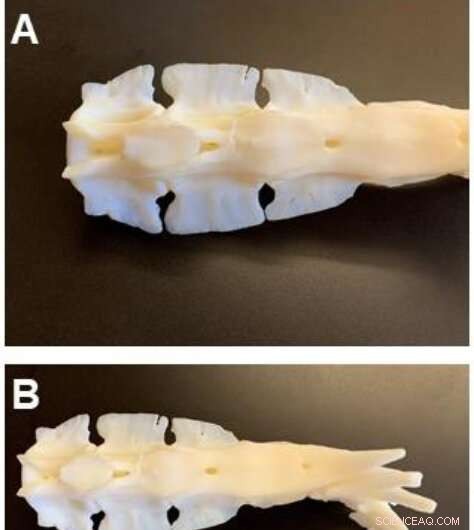
3D-utskrifter av stjärtspindelns skelett (området där stjärtfenan fäster) i en albacore. Kredit:Zhu et al., Sci. Robot. 4, eaax4615 (2019)
Relationen mellan biologi och robotik är cirkulär, sa Lauder. "En anledning till att jag tror att vi har ett framgångsrikt forskningsprogram inom detta område är på grund av den stora interaktionen mellan biologer och robotiker." Varje upptäckt i en gren informerar den andra, en typ av pedagogisk återkopplingsslinga som ständigt utvecklar både vetenskapen och tekniken.
"Vi antar inte att biologin har utvecklats till den bästa lösningen, ", sa Bart-Smith. "Dessa fiskar har haft lång tid på sig att utvecklas till en lösning som gör det möjligt för dem att överleva, specifikt, att äta, föröka sig och inte ätas. Utan begränsningar av dessa krav, vi kan fokusera enbart på mekanismer och funktioner som främjar högre prestanda, högre hastighet, högre effektivitet. Vårt yttersta mål är att överträffa biologin. Hur kan vi bygga något som ser ut som biologi men som simmar snabbare än något du ser där ute i havet?"