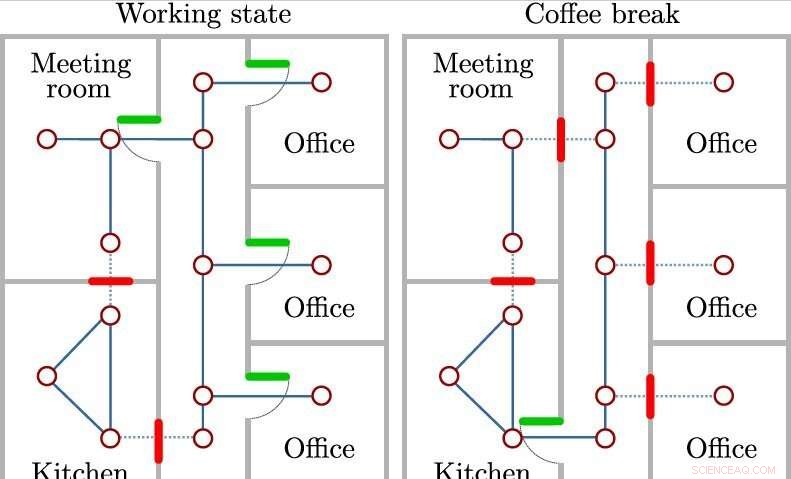
Ett enkelt exempel på upprepade konfigurationer på ett kontor. Kredit:Nardi &Stachniss.
För att effektivt navigera i sin omgivning, Robotar planerar vanligtvis vägar baserat på fördesignade kartor över miljön de arbetar i och observationer som samlas in av deras sensorer. Även om den här typen av navigeringsstrategi kan vara användbar i enkla och statiska miljöer, det är långt ifrån idealiskt i mer komplexa och oförutsägbara sådana, som de som finns i den verkliga världen.
Faktiskt, även om kartor som matas till en robot har sammanställts noggrant och är korrekta, de tar inte hänsyn till oväntade hinder eller förändringar i miljön. Som i de flesta miljöer där robotar så småningom bör användas (t.ex. sjukhus, gallerior, flygplatser, etc.) är mycket oförutsägbara och förändras snabbt, navigeringsmetoder som huvudsakligen bygger på förutformade kartor kan resultera i dåliga banor och navigeringsstrategier.
Medveten om detta problem, två forskare vid universitetet i Bonn har nyligen utvecklat ett tillvägagångssätt som kan göra det möjligt för robotar att navigera i snabbt föränderliga inomhusmiljöer mer effektivt under längre tidsperioder. Detta nya tillvägagångssätt, presenterad i ett papper som för publicerats på arXiv, fungerar i huvudsak genom att fånga återkommande mönster i hur en miljö förändras och utnyttja denna kunskap för att fatta välgrundade navigeringsbeslut.
"Tanken med denna studie är att många förändringar i inomhusmiljöer sker efter upprepade rumsliga mönster, till exempel dörrar som öppnas och stängs samtidigt, " Lorenzo Nardi, en av forskarna som genomförde studien, berättade TechXplore . "Robotar som används för längre perioder i dessa miljöer kan observera och kontinuerligt samla information om det och utnyttja denna kunskap för att planera bättre navigationsstrategier."
I en tidigare studie, samma team av forskare utvecklade ett tillvägagångssätt som samlar information om hur en terräng påverkar en robots navigering utomhus och sedan använder den för att beräkna banor som minimerar vibrationer och energiförbrukning ombord. I deras nya studie, de bestämde sig för att fokusera på robotnavigering inomhus, genom att förutsäga de olika konfigurationer som en miljö antar över tiden.
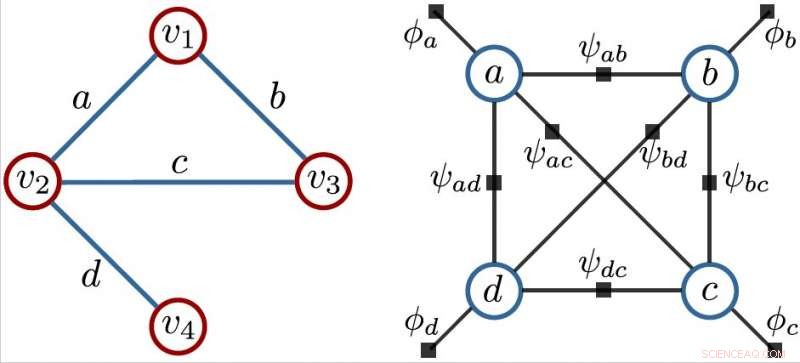
Ett exempel på topologi (vänster) och den probabilistiska grafiska modellen som används av forskarna i deras arbete (höger). Kredit:Nardi &Stachniss.
Metoden som de utvecklat är utformad för att förbättra en robots inomhusnavigering genom att modellera mönster för dynamiska miljöförändringar och utnyttja denna information för att planera vägar för roboten. Genom att använda deras tillvägagångssätt, en robot stöter alltså på färre hinder och blockerade passager längs sin väg till en given plats.
"Den största fördelen med vårt tillvägagångssätt är att det betraktar en miljörepresentation som kontinuerligt kan integrera nya observationer om miljön, " Nardi förklarade. "Denna representation möjliggör planering av bättre banor över tid än giriga kortaste vägplanerare baserade på statiska geometriska kartor över miljön."
Forskarna utvärderade sitt tillvägagångssätt genom att tillämpa det på en serie scenarier i fyra olika inomhusmiljöer:ett litet kontor, ett medelstort kontor, ett stort kontor och ett sjukhus. I dessa experiment, deras tillvägagångssätt fungerade anmärkningsvärt bra, planera effektiva vägar som beaktade miljöförändringar. Dessutom, de jämförde sitt tillvägagångssätt med befintliga tekniker baserade på statiska kartor och fann att det genererar kortare och bättre vägar när roboten används under längre tidsperioder.
"Våra resultat visar att även om komplexiteten i navigationssystemet ökar, vårt tillvägagångssätt leder till att roboten över tid ger korrekta förutsägelser om miljökonfigurationer och utnyttjar denna kunskap för att navigera längs kortare vägar, sa Nardi.
I framtiden, det tillvägagångssätt som föreslagits av Nardi och hans kollega Cyrill Stachniss kan hjälpa till att förbättra robotnavigering i snabbt föränderliga inomhusmiljöer. Det kan visa sig vara särskilt användbart i miljöer där en robots effektivitet är avgörande, såsom sjukhus. Forskarna planerar nu att testa sitt tillvägagångssätt med hjälp av en verklig robotplattform, eftersom detta i slutändan kommer att tillåta dem att utvärdera om de första fynden de samlat in fortfarande håller i verkliga miljöer.
"En annan intressant riktning för framtida forskning kan vara att försöka integrera högfrekventa dynamiska beteenden, såsom andra rörliga dynamiska agenter, in i ramen, sa Nardi.
© 2019 Science X Network