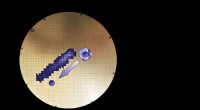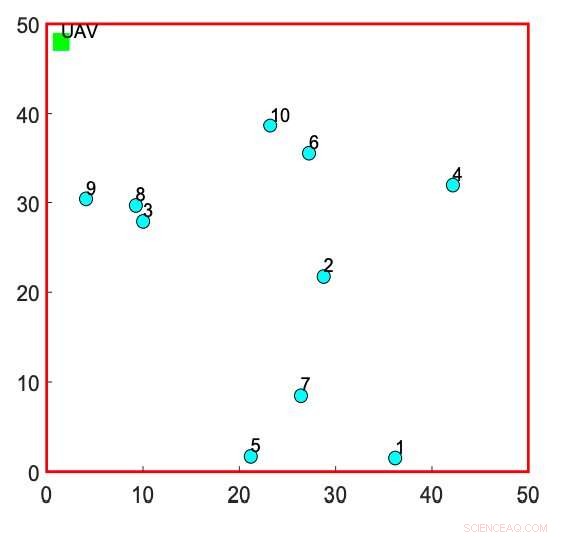
Bild som visar ett tvådimensionellt kartesiskt koordinatsystem, där UAV:en är placerad vid markstationen och GU:erna finns i det aktuella området. Kredit:Tran et al.
Ett team av forskare vid universitetet i Luxemburg och Ontario Tech University har nyligen föreslagit ett nytt tillvägagångssätt för att designa banor för energieffektiva obemannade flygfarkoster (UAV)-aktiverad trådlös kommunikation. Deras papper, förpublicerad på arXiv, fokuserar specifikt på fall där en UAV fungerar som en flygande basstation (BS) för att betjäna markanvändare (GS) inom vissa förutbestämda latensbegränsningar.
"Vårt mål är att designa UAV-banan för att minimera den totala energiförbrukningen samtidigt som RT-kravet och energibudgeten tillgodoses, vilket uppnås genom att gemensamt optimera banan och UAV:s hastigheter längs efterföljande hopp, " skrev forskarna i sin uppsats.
Att optimera en UAVs bana och dess hastigheter tillsammans kan vara lite svårt att uppnå. Att göra så, forskarna utvecklade ett tillvägagångssätt som genomför två på varandra följande steg.
Deras tillvägagångssätt innebär användning av två distinkta algoritmer, en heuristisk sökning och en dynamisk programmeringsalgoritm (DP). Heuristiska sökmetoder fungerar genom att utvärdera all tillgänglig information vid varje steg och bestämma vilken väg som ska följas genom att rangordna tillgängliga alternativ.
Dynamisk programmering, å andra sidan, är ett tillvägagångssätt för att lösa problem med överlappande "delproblem." Det fungerar genom att ta itu med enskilda delproblem endast en gång och spara resultaten av dessa analyser, för att kunna använda dem igen om samma delproblem uppstår i framtiden.
Forskarna använde sina heuristiska sökningar och dynamiska programmeringsalgoritmer för att uppnå en genomförbar uppsättning banor för UAV:er som inte bryter mot markanvändarens latensbegränsningar. Uppgiften att hitta dessa banor löses som om det vore ett så kallat resandeförsäljarproblem med tidsfönster (TSPTW). TSPTW är ett algoritmiskt problem som används inom datavetenskap som innebär att hitta en minimikostnadsväg för en säljare som vill resa och besöka var och en av en uppsättning städer exakt en gång inom ett specifikt tidsfönster.
De banor som föreslogs av algoritmerna jämfördes därefter med de som uppnåddes med hjälp av uttömmande söktekniker och när man närmade sig uppgiften som resandeförsäljarproblemet (TSP); ett algoritmiskt problem där man måste komma på de optimala vägarna för en säljare som vill besöka en specifik uppsättning städer utan några specifika tidskrav.
"Medan den uttömmande algoritmen uppnår bästa prestanda till en hög beräkningskostnad, den heuristiska algoritmen uppvisar sämre prestanda med låg komplexitet, " förklarade forskarna i sin uppsats. "Som ett resultat, DP föreslås som en praktisk avvägning mellan de uttömmande och heuristiska algoritmerna."
Förutom de två algoritmerna för att hitta optimala UAV-banor, forskarna föreslog också en teknik för energiminimering. Denna metod fungerar genom att gemensamt optimera UAV:s hastigheter och efterföljande hopp.
När forskarna utvärderade sina algoritmer fann de att de är mycket effektiva, överträffar befintliga toppmoderna tekniker både när det gäller energiförbrukning och avbrottsprestanda. I framtiden, det nya tillvägagångssättet de föreslog skulle kunna hjälpa till att utforma bättre banor för energiminimering i applikationer som involverar UAV-aktiverad trådlös kommunikation med latensbegränsningar. Dessutom, deras arbete kan bana väg för framtida studier som syftar till att utveckla nya verktyg för att förbättra prestandan hos UAV-kommunikationsnätverk.
© 2019 Science X Network