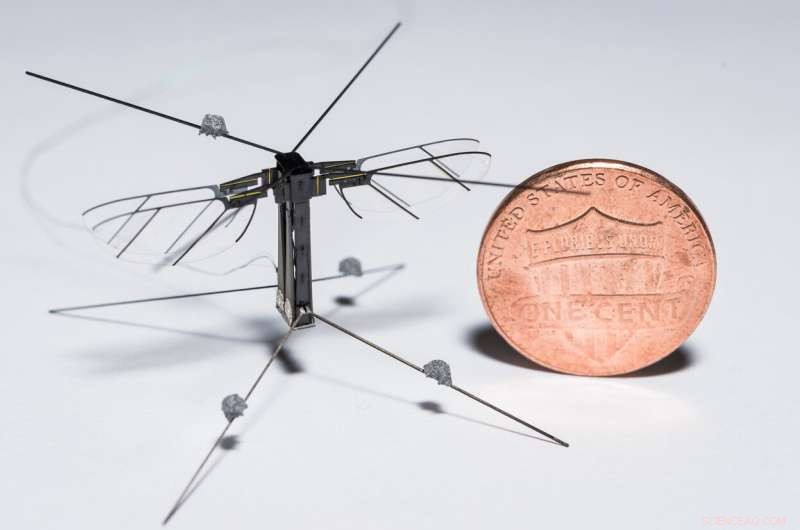
Flygande robotinsekt Bee+. Kredit:Xiufeng Yang.
Ett av de viktigaste problemen för forskare inom området mikrorobotik är att designa och implementera tillförlitliga styrenheter för mikroluftfarkoster i insektsskala (FWMAVs), som är små flygande robotar som vanligtvis är inspirerade av insekter. Faktiskt, även om dessa robotar i insektsstorlek kan ha många användbara tillämpningar, till exempel, hjälpa människor i sök- och räddningsuppdrag eller inom jordbruket, att utveckla kontroller som matchar deras storlek och struktur har hittills visat sig vara svårt.
Forskare vid University of Southern California (USC) har nyligen genomfört en studie som utforskar utmaningarna med att designa dessa kontroller. I deras tidning, förpublicerad på arXiv, de introducerar ett nytt förenande tillvägagångssätt som skulle kunna informera utvecklingen av mer effektiva tekniker för kontroll av FWMAV. Forskarna bakom studien är en del av det autonoma laboratoriet för mikrorobotiska system (AMSL), som är arvtagaren till en forskningslinje som startade vid UC Berkeley för mer än 20 år sedan, fortsatte på Harvard från 2005 och anlände till USC 2013.
"Vi, som ett lag, delar samma dröm som många i mikrorobotsamhället; visionen att skapa helt autonoma konstgjorda insekter som kan fungera intelligent i mycket ostrukturerade miljöer, " Prof. Nestor O Perez-Arancibia, huvudforskaren (PI) för studien, berättade TechXplore. "Personligen, Jag inspireras av naturen. Våra maskiner, inklusive Bee+, vilket är ett fantastiskt stycke ingenjörskonst, släpar fortfarande efter verkliga insekter när det gäller aerobatic kapacitet, aktivering, avkänning, beräkningskraft, etc."
Perez-Arancibia har forskat i mikrorobotsystem i flera år. Han tror att alla mänskligt tillverkade maskiner i slutändan skulle kunna förbättras om man hämtar inspiration från naturen, till exempel genom att observera och replikera binas beteende eller egenskaper, fjärilar och myggor.

Flygande robotinsekt Bee+. Kredit:Xiufeng Yang.
I deras studie, Perez-Arancibia och hans kollegor undersökte kontrollen av flygande insekter med hjälp av två olika experimentella plattformar:en biliknande tvåvingad robot och den fyrvingade Bee+ mikroroboten utvecklad vid USC. I en serie experiment, de kunde visa att en teknik som använder quaternionkoordinater för attitydkontroll, som är utformad för att styra obemannade fordon med fyra rotorer, kan användas för att driva båda dessa robotinsekter.
"Vi kunde förenkla något som många forskare ser som väldigt svårt, " sa Perez-Arancibia. "Jag gillar att tro att detta är ett fall där intelligent modellering (dvs. genom att se på problemet ur ett nytt och "bättre" perspektiv), vi kan förstå och analysera till synes svårlösta komplexa fenomen som kan hjälpa oss att utveckla bättre robotdesigner, särskilt när det gäller aerodynamisk kraftgenerering, mekanismskonfiguration och manövrering. "
Resultaten av testerna utförda av Perez-Arancibia och hans kollegor tyder på att den generiska strategin som de introducerade skulle kunna användas för att kontrollera olika typer av konstgjorda insekter som delar vissa gemensamma egenskaper. Även om de specifikt visade effektiviteten av denna strategi på en tvåvingad robot och den fyrvingade Bee+-roboten, det skulle potentiellt även kunna tillämpas på andra insektsliknande mikrorobotar.
Perez-Arancibia anser att genom att följa en kontrollstrategi på hög nivå som frikopplar problemen med aktivering och flygkontroll, det är möjligt att identifiera allmänna algoritmer som kan användas på flera plattformar. Till exempel, Detta tillvägagångssätt skulle kunna göra det möjligt för forskare att utveckla nya algoritmer för aerobatisk flygning med 19-grams quadrotors som sedan kan implementeras på en 95-milligram, fyrvingade Bee+.
"Detta är relevant eftersom i takt med att robotbladblad blir mindre, de blir också svårare att tillverka, svårare att hantera och dyrare, "Sade Perez-Arancibia." Följaktligen som visas i vårt papper, det faktum att samma tillvägagångssätt kan användas för att syntetisera styrenheter för plattformar med viktskillnader så stora som två storleksordningar är betydelsefullt och relevant ur både forsknings- och praktiskt perspektiv."
I framtiden, det tillvägagångssätt som introducerats av detta team av forskare vid USC skulle kunna ge information om utformningen och implementeringen av nya styrenheter för insektsliknande mikrorobotar. Dessutom, under de närmaste månaderna, Perez-Arancibia och hans kollegor kommer att arbeta på ett annat projekt som syftar till att skapa den allra första helt autonoma sub-gram flygande konstgjorda insekten.
"För närvarande, den huvudsakliga begränsningen som har hindrat mikrorobotiker från att uppnå autonom flygning på subgramskalan är de extremt låga energitätheterna hos elektriska batterier, Perez-Arancibia sa. "Vi kommer att uppnå autonomi genom att använda konstgjorda muskler som drivs av katalytiska reaktioner."
© 2019 Science X Network