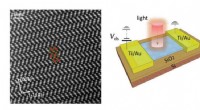
En bild av sensorn för flera kamera. Kredit:Trueeb, Sferrazza &D’Andrea.
Ett team av forskare vid ETH Zürich i Schweiz har nyligen utvecklat en optisk taktil sensor med flera kameror (dvs. en taktil sensor baserad på optiska enheter) som samlar in information om kontaktkraftsfördelningen som appliceras på dess yta. Denna sensor, presenteras i en tidning förpublicerad på arXiv, skulle kunna användas för att utveckla mjuka robotskinn baserade på datorseendealgoritmer.
"Jämfört med de synförmåga som robotar kan uppnå med moderna kameror, känselkänslan hos robotar är mycket underutvecklad, "Camill Trueeb, Carmelo Sferrazza och Raffaello D"Andrea, forskarna som genomförde studien, berättade Tech Xplore via e-post. "Visionsbaserade taktila skinn syftar till att överbrygga detta gap, utnyttja kapaciteten hos synsensorer och toppmoderna artificiell intelligensalgoritmer, dra nytta av tillgången till stora mängder data och beräkningskraft."
Den optiska känselsensorn utvecklad av Trueeb, Sferrazza och D"Andrea består av fyra kameror placerade under en mjuk, transparent material som innehåller en inbäddad spridning av sfäriska partiklar inom sig. Kamerorna spårar rörelsen hos dessa sfäriska partiklar, som uppstår vid deformation av materialet när en kraft appliceras på det.
Forskarna utvecklade också en maskininlärningsarkitektur (ML) som analyserar rörelsen hos de sfäriska partiklarna i materialet. Genom att analysera denna rörelse, denna arkitektur kan rekonstruera krafterna som orsakar en deformation i materialet, även känd som kontaktkraftsfördelningen.
"Vi använder relativt billiga kameror som samtidigt ger bilder för totalt cirka 65, 000 pixlar, " förklarade forskarna. "Därför, de genererar en stor mängd information med mycket hög upplösning, vilket är idealiskt för en datadriven metod för taktil avkänning."
Istället för att bara ge totala kraftvärden, liksom majoriteten av befintliga standardkraftsensorer för robotapplikationer, sensorn som utvecklats av forskarna ger feedback om fördelningen av alla krafter som appliceras på dess mjuka yta, frikoppling av normala och tangentiella komponenter. På grund av sin struktur och unika design, den nya flerkamerasensorn uppvisar också en större kontaktyta och en tunnare struktur än andra kamerabaserade taktila sensorer utan att kräva ytterligare reflekterande komponenter (t.ex. speglar).
"Användningen av flera kameror gör det möjligt att använda den här typen av taktil sensor för att täcka större områden med godtyckliga former, " sa forskarna. "Detta arbete visar hur kunskapen som förvärvats på en delmängd av kamerorna kan överföras till ytterligare kameror, vilket resulterar i en skalbar, dataeffektivt tillvägagångssätt."
Den AI-drivna, multikamerasensor kan i slutändan skalas till större ytor, möjliggör skapandet av mjuka och avkännande robotskinn. I deras senaste tidning, forskarna diskuterar hur deras ML-arkitektur skulle kunna anpassas för att underlätta dessa tillämpningar i framtiden.
"Vi planerar nu att utöka sensorns möjligheter för att rekonstruera information om kontakten med föremål av komplexa och generiska former, " sa forskarna. "Vi anser att utvecklingen av avkänningsalgoritmer alltid bör ta hänsyn till dataeffektivitetskomponenten för att underlätta utbredd användning inom robotik, och vi kommer därför att följa denna riktning i framtida arbete, också."
© 2019 Science X Network