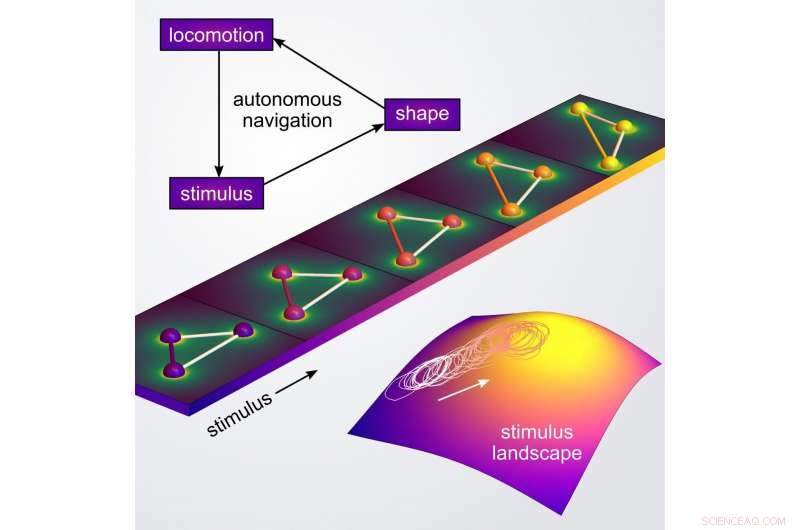
Ett schema över den autonoma navigeringsmekanismen via shapeshifting Kredit:Yong Dou/Columbia Engineering
De flesta syntetiska material, inklusive de i batterielektroder, polymermembran, och katalysatorer, försämras med tiden eftersom de inte har interna reparationsmekanismer. Om du kunde distribuera autonoma mikrorobotar inom dessa material, sedan kan du använda mikrorobotarna för att kontinuerligt göra reparationer från insidan. En ny studie från Kyle Bishops labb, docent i kemiteknik, föreslår en strategi för robotar i mikroskala som kan känna av symptom på en materialdefekt och navigera autonomt till defektplatsen, där korrigerande åtgärder kan utföras. Studien publicerades i Physical Review Research 2 december, 2019.
Simbakterier letar efter regioner med hög näringskoncentration genom att integrera kemiska sensorer och molekylära motorer, ungefär som en självkörande bil som använder information från kameror och andra sensorer för att välja en lämplig åtgärd för att nå sin destination. Forskare har försökt efterlikna dessa beteenden genom att använda små partiklar som drivs av kemiska bränslen eller andra energiinsatser. Medan rumsliga variationer i miljön (t.ex. i bränslekoncentrationen) kan verka för att fysiskt orientera partikeln och därigenom styra dess rörelse, denna typ av navigering har begränsningar.
"Befintliga självgående partiklar är mer som ett skenande tåg som styrs mekaniskt av de slingrande rälsen än en självkörande bil som styrs autonomt av sensorisk information, " säger Bishop. "Vi undrade om vi kunde designa robotar i mikroskala med materialsensorer och ställdon som navigerar mer som bakterier."
Bishops team utvecklar ett nytt tillvägagångssätt för att koda den autonoma navigeringen av mikrorobotar som är baserad på formskiftande material. Lokala egenskaper i miljön, såsom temperatur eller pH, bestämma partikelns tredimensionella form, vilket i sin tur påverkar dess självgående rörelse. Genom att kontrollera partikelns form och dess reaktion på miljöförändringar, forskarna modellerar hur mikrorobotar kan konstrueras för att simma upp eller ner för stimulusgradienter, även de som är för svaga för att direkt kännas av partikeln.
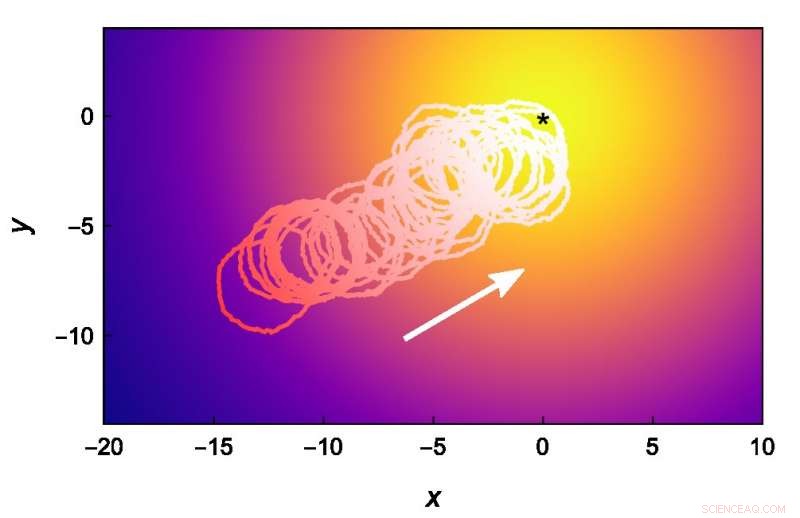
Simulerad navigeringsbana i buller och komplexa miljöer. Kredit:Yong Dou/Columbia Engineering
"För första gången, vi visar hur responsiva material kan användas som omborddatorer för robotar i mikroskala, mindre än tjockleken på ett människohår, som är programmerade att navigera autonomt, säger Yong Dou, en medförfattare till studien och en Ph.D. student i Bishops labb. "Sådana mikrorobotar skulle kunna utföra mer komplexa uppgifter som distribuerad avkänning av materialdefekter, autonom leverans av terapeutisk last, och reparationer på begäran av material, celler, eller vävnader."
Bishops team sätter nu upp experiment för att i praktiken demonstrera deras teoretiska navigeringsstrategi för mikrorobotar, använda formskiftande material såsom flytande kristallelastomerer och formminneslegeringar. De förväntar sig att visa att experimenten kommer att bevisa att stimuli-responsiv, formskiftande mikropartiklar kan använda konstruerad återkoppling mellan avkänning och rörelse för att navigera autonomt.