Fotgängare, den bipedala roboten som utvecklats av forskarna, korsar gatan bredvid en mänsklig användare. Upphovsman:Ahmad et al.
Människor kan i allmänhet anpassa sin gångstil baserat på miljön de rör sig i, till exempel, påskynda om markens konsistens under deras fötter tillåter det, saktar ner när golvet är halt, ändra riktning för att undvika pölar eller hål i marken, och så vidare. För att navigera i olika miljöer, robotar ska kunna anpassa sitt gångbeteende på ett liknande sätt, anpassa sin struktur som svar på miljöförändringar.
Med detta i åtanke, Forskare vid Osaka University i Japan har nyligen skapat Fotgängare, en bipedal robot som kan förändra några av de fysiska egenskaperna och rörelserna i benen som svar på förändringar i den omgivande miljön. Denna nya robot, presenteras i ett papper publicerat i SAGE:s tidskrift Adaptivt beteende , kan ändra sin gångstil med ett enkelt system som förbinder rörelser och konfiguration av sina två ben.
"Huvudsyftet med vårt arbete är att utveckla robusta robotar som kan hantera störningar; robotar som kan följa med människor och gå effektivt över även terräng såväl som ojämna sådana som gräs och grus, "Huthaifa Ahmad, en av forskarna som genomförde studien, berättade TechXplore. "För att nå detta mål, vi behöver utveckla robotsystem med en adaptiv morfologi; eftersom även med de flesta avancerade tvåbentiga robotar som är tillgängliga idag, Att ha en exakt modell av både robotkroppen och miljön är avgörande för att de ska fungera korrekt. "
Fotgängare, roboten som utvecklats av Ahmad och hans kollegor, förlitar sig på ett ställdonets nätverkssystem (ANS), ett designkoncept som introducerades i deras tidigare arbete. I sina tidigare studier, forskarna införlivade samma koncept i flera andra tillämpningar, inklusive robotryggar, armar och robotar med flera ben.
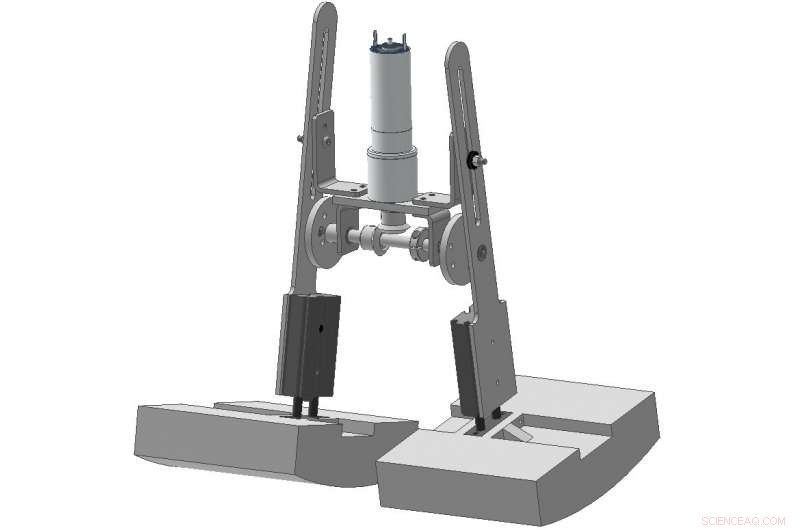
En illustration av fotgängare. Upphovsman:Ahmad et al.
"Eftersom dess genomförbarhet visades i flera studier, Jag använder för närvarande ANS -principen i min forskning för att uppnå anpassningsbara robotar, genom att använda de olika interaktionerna mellan de monterade ställdonen på deras kroppar, "Sa Ahmad.
Robotens rörelser som utvecklats av Ahmad och hans kollegor produceras av en enda motor, och dess ben är sammanlänkade genom ett ANS. I motsats till andra bipedala robotar baserade på komplexa system, Fotgängare har en ganska enkel struktur. Roboten anpassar sig till förändringar i sin omgivande miljö genom att utnyttja benens fysiska egenskaper och interaktioner mellan dess olika komponenter, vilket resulterar i en rad olika gångbeteenden.
"Robotens gångbeteende förändras genom att ändra interaktionen mellan ställdonen på ANS, "Sade Ahmad." För att få bättre beteende, robotens krav på ett visst anslutningsmönster skiljer sig utifrån den givna situationen. Vårt arbete tyder på att det bästa sättet att förverkliga självanpassningsbara robotar är genom att göra det möjligt för dem att justera sina morfologier och utnyttja hela kroppsdynamiken som svar på miljöförändringar. "

Fotgängare, den bipedala roboten som utvecklats av forskarna. Upphovsman:Ahmad et al.
Forskarna utvärderade sin robots prestanda i en serie experiment. För det första, de testade hur förändringar i robotens morfologi påverkade dess gångbeteende genom att observera dess förmåga att anpassa sig till olika markmaterial, med fokus på förändringar i sin gångstil, stabilitet, fart, och i vilken riktning den rörde sig.
Efter att ha analyserat resultaten som samlats in i detta första experiment, Ahmad och hans kollegor uppgraderade robotens design på ett sätt som gjorde att den automatiskt kunde växla över olika anslutningsmönster mellan benen. De genomförde sedan en andra utvärdering och fann betydande förbättringar i hur roboten justerade sin morfologi under rörelse. I detta andra experiment, Fotgängare producerade effektivt anpassningsbara gångstilar som svar på miljön där den fungerade.
I framtiden, roboten som utvecklats av detta team av forskare kan användas för att slutföra uppgifter som innebär att flytta runt i okontrollerade och ständigt föränderliga miljöer. Medan fotgängare kan ändra typ av interaktion mellan benen för att producera olika rörelsebeteenden som bäst matchar omgivningen, den kan fortfarande inte självständigt identifiera de morfologiska justeringar som är bäst lämpade för specifika situationer. Forskarna planerar att fortsätta arbeta med roboten för att möjliggöra denna viktiga förmåga, vilket är nödvändigt för roboten att fungera utan kontinuerlig mänsklig input och vägledning.
"Nästa steg i vår forskning kommer att vara att realisera ett styrsystem som kan låta roboten fortsätta att ge bästa prestanda under alla rörelsefaser, autonomt välja ett lämpligt anslutningsmönster, "Sade Ahmad." Dessutom, genom att utvidga ANS till att omfatta fler delar av roboten (t.ex. övre kroppen), detta kommer att öka de möjliga morfologiska förändringarna, vilket i sin tur reflekterar över robotens anpassningsförmåga. "
© 2020 Science X Network