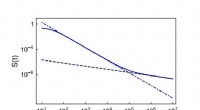
Figur som visar strategin för synbaserad taktil avkänning introducerad av forskarna. Kredit:Sferrazza, et al., ieeexplore.ieee.org/document/8918082
För att effektivt interagera med sin omgivning, robotar ska kunna identifiera egenskaper hos olika föremål bara genom att röra dem, som människor gör. Detta skulle göra det möjligt för dem att få tag i och hantera objekt mer effektivt, använda feedback som samlats in av sensorer för att justera sina grepp- och manipulationsstrategier.
Med detta i åtanke, forskargrupper över hela världen har försökt utveckla tekniker som kan ge robotar en känsla av beröring genom att analysera data som samlats in av sensorer, många av dem är baserade på användningen av djupinlärningsarkitekturer. Även om vissa av dessa metoder är lovande, de kräver vanligtvis stora mängder träningsdata och generaliserar inte alltid bra över tidigare osynliga objekt.
Forskare vid ETH Zürich har nyligen introducerat en ny djupinlärningsbaserad strategi som skulle kunna möjliggöra taktil avkänning i robotar utan att kräva stora mängder verklig data. Deras tillvägagångssätt, beskrivs i ett papper som för publicerats på arXiv, innebär utbildning av djupa neurala nätverk helt på simuleringsdata.
"Vår teknik lär av data hur man kan förutsäga fördelningen av de krafter som utövas av ett objekt i kontakt med den avkännande ytan, "Carlo Sferrazza, en av forskarna som genomförde studien, berättade TechXplore. "Än så länge, dessa data (i storleksordningen tiotusentals datapunkter) behövde samlas in i en experimentell uppställning under flera timmar, vilket var dyrt sett till tid och utrustning. I det här arbetet, vi genererade vår data helt i simulering, bibehåller hög avkänningsnoggrannhet när vi använder vår teknik i den verkliga världen."
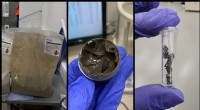
I sina experiment, Sferrazza och hans kollegor använde en sensor som de byggde med enkla och billiga komponenter. Denna sensor består av en standardkamera placerad under ett mjukt material, som innehåller en slumpmässig spridning av små plastpartiklar.
När en kraft appliceras på dess yta, det mjuka materialet deformeras och får plastpartiklarna att röra sig. Denna rörelse fångas sedan av sensorns kamera och registreras.
"Vi utnyttjar bildmönstren som skapas av de rörliga partiklarna för att extrahera information om krafterna som orsakar materialdeformationen, ", förklarade Sferrazza. "Genom att tätt bädda in partiklarna i materialet kan vi få en extremt hög upplösning. Eftersom vi tar ett datadrivet tillvägagångssätt för att lösa denna uppgift, vi kan övervinna komplexiteten i att modellera kontakt med mjuka material och uppskatta fördelningen av dessa krafter med hög noggrannhet."
Väsentligen, forskarna skapade modeller av sensorns mjuka material och kameraprojektion med hjälp av toppmoderna beräkningsmetoder. De använde sedan dessa modeller i simuleringar, för att skapa en datauppsättning av 13, 448 syntetiska bilder som är idealiska för att träna taktila avkänningsalgoritmer. Det faktum att de kunde generera träningsdata för sin taktila avkänningsmodell i simuleringar är mycket fördelaktigt, eftersom det hindrade dem från att behöva samla in och kommentera data i den verkliga världen.
"Vi utvecklade också en överföringsinlärningsteknik som gör att vi kan använda samma modell på flera instanser av de taktila sensorerna vi producerar i den verkliga världen, utan behov av ytterligare data, ", sa Sferrazza. "Detta innebär att varje sensor blir billigare att producera, eftersom de inte kräver ytterligare kalibreringsinsatser. "
Forskarna använde den syntetiska datamängden de skapade för att träna en neural nätverksarkitektur för synbaserade taktila avkänningsapplikationer och utvärderade sedan dess prestanda i en serie tester. Det neurala nätverket uppnådde anmärkningsvärda resultat, göra exakta avkänningsförutsägelser på verkliga data, även om den var utbildad i simuleringar.
"Den skräddarsydda neurala nätverksarkitektur som vi tränade visar också mycket lovande generaliseringsmöjligheter för användning i andra situationer, när den tillämpas på data som skiljer sig ganska mycket från den som används i våra simuleringar, t.ex., för uppskattning av kontakt med enstaka eller flera föremål med godtyckliga former, "Sa Sferrazza.
I framtiden, den djupinlärningsarkitektur som utvecklats av Sferrazza och hans kollegor kan ge robotar en konstgjord känsla, potentiellt förbättra deras grepp- och manipulationsförmåga. Dessutom, den syntetiska datamängden de sammanställde skulle kunna användas för att träna andra modeller för taktil avkänning eller kan inspirera till skapandet av nya simuleringsbaserade datamängder.
"Vi vill nu utvärdera våra algoritmer i uppgifter som involverar mycket generella interaktioner med komplexa objekt, och vi arbetar också med att förbättra deras noggrannhet, "Sferrazza sa. "Vi tror att denna teknik kommer att visa sina fördelar när den tillämpas på verkliga robotuppgifter, som applikationer som involverar finmanipulering av ömtåliga föremål - som ett glas eller ett ägg."
© 2020 Science X Network