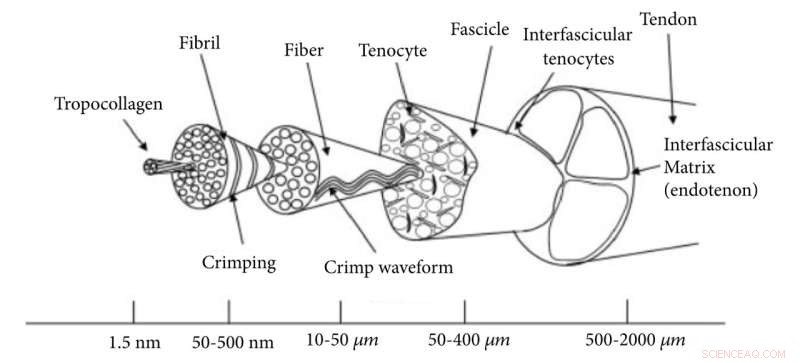
Hierarkisk struktur av senvävnad (anpassad från Thorpe et al). Kredit:Cyborg and Bionic Systems (2022). DOI:10.34133/2022/9842169
En granskning av forskare vid University of Oxford diskuterade möjliga fördelar med att använda humanoida muskuloskeletala robotar och mjuka robotsystem som bioreaktorplattformar för att producera kliniskt användbara senkonstruktioner.
Det nya granskningsdokumentet, publicerat den 15 september 2022 i tidskriften Cyborg and Bionic Systems , sammanfattar nuvarande trender inom senvävnadsteknik och diskuterar hur konventionella bioreaktorer inte kan tillhandahålla fysiologiskt relevant mekanisk stimulering med tanke på att de till stor del är beroende av enaxliga dragsteg. Uppsatsen lyfter sedan fram muskuloskeletala humanoida robotar och mjuka robotsystem som plattformar för att tillhandahålla fysiologiskt relevant mekanisk stimulering som skulle kunna övervinna denna translationsgap.
Sen- och mjukdelsskador är ett växande socialt och ekonomiskt problem, med senorreparationsmarknaden i USA som uppskattas till 1,5 miljarder USD. Senreparationsoperationer har höga revisionsfrekvenser, med uppåt 40 % av reparationerna av rotatorcuff som misslyckas postoperativt. Produktion av konstruerade sentransplantat för klinisk användning är en potentiell lösning för denna utmaning. Konventionella senbioreaktorer tillhandahåller huvudsakligen enaxlig dragstimulering. Bristen på system som rekapitulerar senbelastningen in vivo är en stor translationell lucka.
"Människroppen förser senor med tredimensionell mekanisk stress i form av spänning, kompression, vridning och skjuvning. Aktuell forskning tyder på att frisk inhemsk senvävnad kräver flera typer och riktningar av stress. Avancerade robotsystem som muskuloskeletala humanoider och mjuka robotik lovande plattformar som kanske kan efterlikna senbelastning in vivo", förklarade författaren Iain Sander, forskare vid University of Oxford med Soft Tissue Engineering Research Group.
Muskuloskeletala humanoida robotar designades ursprungligen för tillämpningar som krocktestdockor, proteser och atletisk förbättring. De försöker imitera mänsklig anatomi genom att ha liknande kroppsproportioner, skelettstruktur, muskelarrangemang och ledstruktur. Muskuloskeletala humanoider som Roboy och Kenshiro använder sendrivna system med myorobotiska ställdon som efterliknar mänsklig neuromuskulär vävnad.
Myorobotiska enheter består av en borstlös likströmsmotor som genererar spänningar som mänskliga muskler, fästkablar som fungerar som senenheten och ett motordrivkort med en fjäderkodare, som fungerar som det neurologiska systemet genom att känna av variabler inklusive spänning, kompression, muskellängd och temperatur.
Föreslagna fördelar med muskuloskeletala humanoider inkluderar förmågan att tillhandahålla multiaxiell belastning, potential för belastning med hänsyn till mänskliga rörelsemönster och tillhandahållande av belastningsstorlekar jämförbara med in vivo-krafter. En nyligen genomförd studie har visat möjligheten att odla mänsklig vävnad på en muskuloskeletal humanoid robot för senkonstruktion.
Biohybrid mjuk robotik är fokuserad på att utveckla biomimetiska, kompatibla robotsystem som tillåter adaptiva, flexibla interaktioner med oförutsägbara miljöer. Dessa robotsystem aktiveras genom ett antal modaliteter, inklusive temperatur, pneumatiskt och hydrauliskt tryck och ljus.
De är gjorda av mjuka material inklusive hydrogeler, gummi och till och med mänsklig muskuloskeletal vävnad. Dessa system används redan för att tillhandahålla mekanisk stimulering till konstruktioner av glatt muskelvävnad och har implementerats in vivo i en grismodell.
Dessa system är attraktiva för senvävnadsteknik med tanke på att:i) deras flexibla, följsamma egenskaper gör att de lindar sig runt anatomiska strukturer, efterliknar konfigurationen av infödda senor ii) de kan tillhandahålla multiaxiell aktivering och iii) ett antal av de tekniker som används i mjuk robotik överlappar nuvarande senorvävnadsteknik.
Ser fram emot ser teamet avancerade robotsystem som plattformar som kommer att ge fysiologiskt relevant mekanisk stimulans till sentransplantat före klinisk användning. Det finns ett antal utmaningar att överväga när avancerade robotsystem implementeras. För det första kommer det att vara viktigt för framtida experiment att jämföra tekniker som föreslås i denna översyn med konventionella bioreaktorer.
Med utveckling av system som kan ge multiaxiell belastning kommer det att vara viktigt att hitta metoder för att kvantifiera töjning i 3D. Slutligen kommer avancerade robotsystem att behöva vara mer överkomliga och tillgängliga för utbredd implementering.
"Ett ökande antal forskargrupper visar att det är möjligt att använda avancerad robotik i kombination med levande celler och vävnader för vävnadsteknik och bioaktueringstillämpningar. Vi är nu i ett spännande skede där vi kan utforska de olika möjligheterna att införliva dessa teknologier i senvävnadsteknik och undersöka om de verkligen kan bidra till att förbättra kvaliteten på konstruerade sentransplantat", säger Pierre-Alexis Mouthuy, översiktsartikelns seniorförfattare.
På lång sikt har dessa teknologier potential att förbättra livskvaliteten för individer, genom att minska smärtan och risken för senreparationsfel, för sjukvårdssystemen, genom att minska antalet revisionsoperationer och för ekonomin, genom att förbättra produktiviteten på arbetsplatsen och sänka sjukvårdskostnader. + Utforska vidare