
Vagnen var försedd med robotögon som kunde flyttas i vilken riktning som helst, kontrollerad av en i forskargruppen. Vindrutan var täckt för att ge intrycket att det inte fanns någon förare inuti. Kredit:Chang et al. 2022
Robotögon på autonoma fordon kan förbättra fotgängarnas säkerhet, enligt en ny studie vid University of Tokyo. Deltagarna spelade upp scenarier i virtuell verklighet (VR) och fick bestämma sig för om de skulle korsa en väg framför ett fordon i rörelse eller inte. När fordonet var försett med robotögon, som antingen tittade på fotgängaren (registrerade deras närvaro) eller bort (inte registrerade dem), kunde deltagarna göra säkrare eller effektivare val.
Självkörande fordon verkar vara precis runt hörnet. Oavsett om de ska leverera paket, plöja åkrar eller skjutsa barn till skolan, pågår mycket forskning för att förverkliga en gång futuristisk idé.
Medan det främsta bekymret för många är den praktiska sidan av att skapa fordon som autonomt kan navigera i världen, har forskare vid University of Tokyo riktat sin uppmärksamhet mot en mer "mänsklig" oro för självkörande teknik. "Det finns inte tillräckligt med undersökningar av samspelet mellan självkörande bilar och människorna runt omkring dem, som fotgängare. Så vi behöver mer utredning och ansträngning för sådan interaktion för att ge samhället säkerhet och trygghet angående självkörande bilar", säger Professor Takeo Igarashi från Graduate School of Information Science and Technology.
En nyckelskillnad med självkörande fordon är att förare kan bli mer av en passagerare, så de kanske inte uppmärksammar vägen fullt ut, eller att det inte finns någon vid ratten alls. Detta gör det svårt för fotgängare att avgöra om ett fordon har registrerat sin närvaro eller inte, eftersom det kanske inte finns någon ögonkontakt eller indikationer från personerna i det.
Så, hur kan fotgängare göras medvetna om när ett autonomt fordon har lagt märke till dem och har för avsikt att stanna? Som en karaktär från Pixar-filmen Cars, var en självkörande golfbil utrustad med två stora, fjärrstyrda robotögon. Forskarna kallade den "den blickande bilen". De ville testa om att sätta rörliga ögon på vagnen skulle påverka människors mer riskfyllda beteende, i det här fallet om folk fortfarande skulle korsa vägen framför ett fordon i rörelse när de har bråttom.
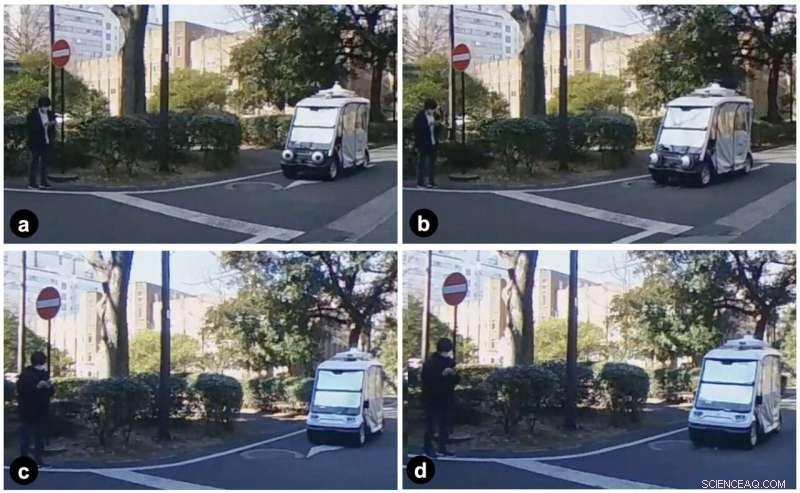
I experimentet var deltagarna tvungna att bestämma om vagnen hade lagt märke till dem och skulle stanna. Bilderna visar förstapersonsvyn av en deltagare. I (a) uppmärksammar vagnen deltagaren (säker att korsa); i (b) vagnen inte uppmärksammar deltagaren (osäker att korsa); och i (c) och (d) vet deltagaren inte. Kredit:Chang et al. 2022
Teamet satte upp fyra scenarier, två där vagnen hade ögon och två utan. Vagnen hade antingen lagt märke till fotgängaren och hade för avsikt att stanna eller så hade den inte lagt märke till dem och skulle fortsätta köra. När vagnen hade ögon tittade ögonen antingen mot fotgängaren (som skulle stanna) eller tittade bort (kommer inte att stanna).
Eftersom det uppenbarligen skulle vara farligt att be volontärer välja om de ska gå framför ett fordon i rörelse i verkligheten (även om det fanns en dold förare för detta experiment), spelade teamet in scenarierna med 360-graders videokameror och 18 deltagare (nio kvinnor och nio män, i åldern 18–49 år, alla japanska) spelade igenom experimentet i VR. De upplevde scenarierna flera gånger i slumpmässig ordning och fick tre sekunder varje gång att bestämma sig för om de skulle korsa vägen framför vagnen eller inte. Forskarna registrerade sina val och mätte felfrekvensen för sina beslut, det vill säga hur ofta de valde att sluta när de kunde ha passerat och hur ofta de gick över när de borde ha väntat.
"Resultaten antydde en tydlig skillnad mellan könen, vilket var mycket överraskande och oväntat", säger projektföreläsare Chia-Ming Chang, en medlem av forskargruppen. "Medan andra faktorer som ålder och bakgrund också kan ha påverkat deltagarnas reaktioner, anser vi att detta är en viktig punkt, eftersom det visar att olika trafikanter kan ha olika beteenden och behov, som kräver olika kommunikationssätt i vår framtida självkörning. världen.
"I den här studien tog de manliga deltagarna många farliga vägkorsningsbeslut (d.v.s. valde att korsa när bilen inte stannade), men dessa fel reducerades av vagnens blick. Det var dock inte stor skillnad i säkra situationer för dem (dvs valde att korsa när bilen skulle stanna)", förklarade Chang.
"Å andra sidan fattade de kvinnliga deltagarna mer ineffektiva beslut (d.v.s. valde att inte korsa när bilen hade för avsikt att stanna) och dessa fel reducerades av vagnens ögonblick. Det var dock inte stor skillnad i osäkra situationer för dem." I slutändan visade experimentet att ögonen resulterade i en smidigare eller säkrare korsning för alla.
Men hur fick ögonen deltagarna att känna sig? Vissa tyckte att de var söta, medan andra såg dem som läskiga eller läskiga. För många manliga deltagare, när ögonen tittade bort, rapporterade de att de kände att situationen var farligare. För kvinnliga deltagare, när ögonen tittade på dem, sa många att de kände sig säkrare.
"Vi fokuserade på ögonens rörelse men ägnade inte för mycket uppmärksamhet åt deras visuella design i den här studien. Vi byggde bara den enklaste för att minimera kostnaderna för design och konstruktion på grund av budgetbegränsningar", förklarade Igarashi. "I framtiden skulle det vara bättre att låta en professionell produktdesigner hitta den bästa designen, men det skulle förmodligen fortfarande vara svårt att tillfredsställa alla. Jag gillar det personligen. Det är lite gulligt."
Teamet inser att denna studie är begränsad av det lilla antalet deltagare som spelar ut bara ett scenario. Det är också möjligt att människor kan göra olika val i VR jämfört med det verkliga livet. Men, "att gå från manuell körning till autokörning är en enorm förändring. Om ögon faktiskt kan bidra till säkerhet och minska trafikolyckor bör vi seriöst överväga att lägga till dem. I framtiden skulle vi vilja utveckla automatisk styrning av robotögonen kopplade till den självkörande AI:n (istället för att vara manuellt styrd), som skulle kunna hantera olika situationer, säger Igarashi. "Jag hoppas att den här forskningen uppmuntrar andra grupper att prova liknande idéer, allt som underlättar bättre interaktion mellan självkörande bilar och fotgängare, vilket i slutändan räddar människors liv."
Studien publicerades som en del av Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications . + Utforska vidare














