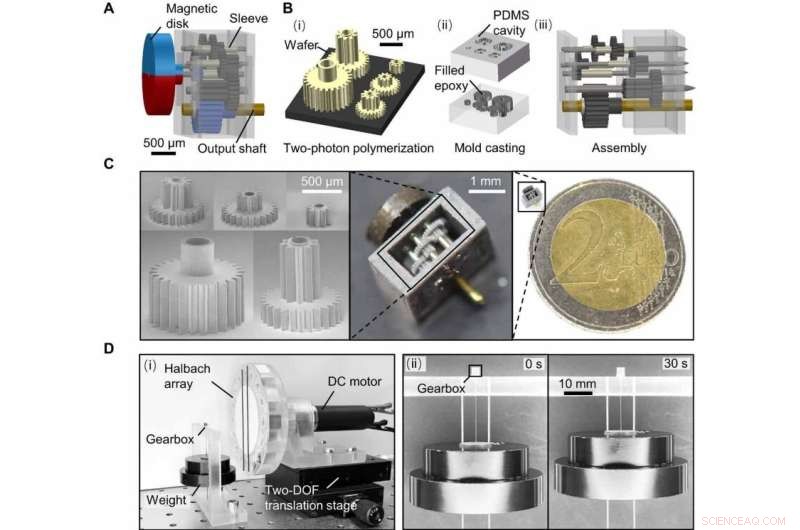
Design och prestanda för den magnetiskt manövrerade miniatyrväxellådan för magnetiska ställdon i millimeterskala. Kredit:Science Robotics (2022). DOI:10.1126/scirobotics.abo4401
Ett team av forskare vid Max Planck Institute for Intelligent Systems, som arbetar med ett par kollegor från Harbin Institute of Technology, har utvecklat en liten manövrerad växellåda som kan användas för att ge mycket små robotar mer kraft. I deras artikel publicerad i tidskriften Science Robotics, gruppen beskriver hur deras växellåda fungerar och de effektförbättringar som observerats i flera typer av små robotar.
Under de senaste åren har forskare arbetat mot utvecklingen av små robotar som kan injiceras i människokroppen för att utföra medicinska procedurer. Förhoppningen är att sådana robotar kan skickas för att hitta och förstöra till exempel cancertumörer. Sådana små robotar är för små för att bära sitt eget kraftverk; sålunda måste de manipuleras med hjälp av ett externt magnetfält. Tyvärr, när robotarna blir allt mindre, minskar deras kraft eftersom de har för lite massa. I denna nya satsning har forskarna hittat ett sätt att öka kraften hos de små robotarna med hjälp av en liten växellåda som hjälper dem att bli starkare.
Växellådan kommer med en magnet på änden för att utnyttja kraften i ett magnetfält via kugghjulen i lådan. Och växellådan kan förstärka kraften hos en robot med hjälp av smarta funktioner, inklusive elastiska komponenter och mekaniska länkar.
För att kunna använda växellådan måste de små robotarna vara byggda på ett sätt för att dra nytta av dem. Till exempel, genom att kombinera elastiska komponenter med mekaniska länkar, kan fjäderliknande energi bygga upp tryck och sedan släppa allt på en gång. De mekaniska länkarna tjänar till att hålla de elastiska komponenterna på plats tills det är dags att frigöra energin.
För att testa sin idé byggde forskarna lådliknande strukturer med elastiska väggdelar som långsamt komprimerades av växellådan när den utsattes för ett magnetfält. En mekanisk länk höll väggarna på plats för att tillåta trycket att byggas upp. När ett visst tryck uppnåtts släpptes väggarna, vilket tryckte roboten i önskad riktning. För att skapa en robot hakades flera av de lådliknande strukturerna ihop. Med detta tillvägagångssätt kunde forskarna skapa robotar av vinschtyp som kunde lyfta upp till 103 gram, eller byglar som nådde 119 millimeter. De skapade också crawlers och crawlers. + Utforska vidare
© 2022 Science X Network