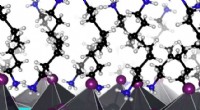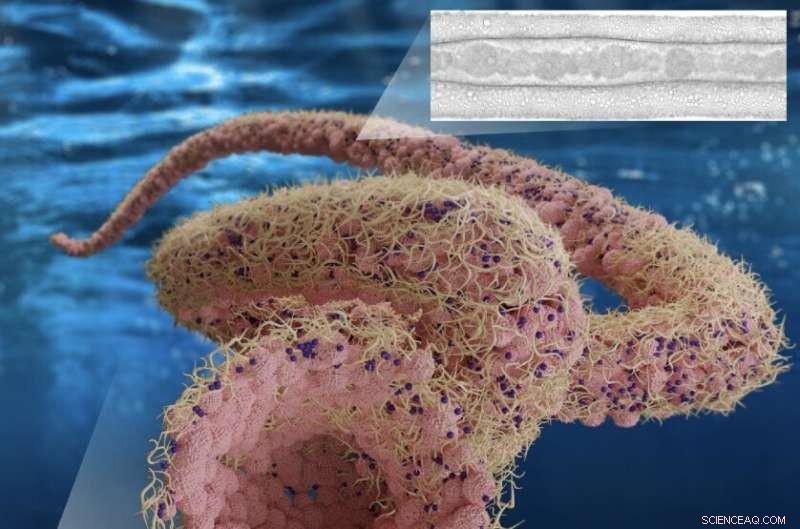
Den förstärkta återgivningen av aquabots. Mikrografen i det nedre vänstra hörnet är akvabotens böjningsform "σ". Mikrofotografiet i det övre högra hörnet är akvabotens kompartmentstrukturer. Återtryckt med tillstånd från {Zhu, Shipei, et al. "Aquabots." ACS nano (2022).} Copyright {2022} American Chemical Society.
Under de senaste åren har robotiker utvecklat en mängd olika robotsystem med olika kroppsstrukturer och kapaciteter. De flesta av dessa robotar är antingen gjorda av hårda material, såsom metaller, eller mjuka material, såsom kisel och gummiliknande material.
Forskare vid Hong Kong University (HKU) och Lawrence Berkeley National Laboratory har nyligen skapat Aquabots, en ny klass av mjuka robotar som huvudsakligen är gjorda av vätskor. Eftersom de flesta biologiska system till övervägande del består av vatten eller andra vattenhaltiga lösningar, introducerades de nya robotarna i en artikel publicerad i ACS Nano , kan ha mycket värdefulla biomedicinska och miljömässiga tillämpningar.
"Vi har varit engagerade i utvecklingen av adaptiva gränssnittssammansättningar av material vid gränssnittet mellan olja och vatten och vatten med hjälp av nanopartiklar och polyelektrolyter," sa Ho Cheung (Anderson) Shum, Thomas P. Russell och Shipei Zhu till TechXplore via e-post. "Vår idé var att sätta ihop materialen som gränssnittet och sammansättningarna låser i formerna på vätskorna. Formerna dikteras med hjälp av yttre krafter för att generera godtyckliga former eller för att använda helvätskeutskrift i 3D för att spatialt kunna organisera sammansättningarna. "
Shum, Russell, Zhu och deras kollegor kopplade helt flytande 3D-utskriftstekniker med vattenhaltiga tvåfasaggregat (ATPS), strategier för att montera 3D-strukturer, för att realisera artificiella konstruktioner som efterliknar biologiska system. ATPS är ett centralt fokusområde för forskargruppen vid HKU som leds av professor Shum.
Idén till den senaste uppsatsen kom när Zhu, en doktorand vid HKU vid den tiden, började fundera på möjligheten att integrera magnetiska nanopartiklar i ATPS-monteringssystem. Detta skulle tillåta dem att styra rörelsen hos ATPS-konstruktionerna med hjälp av externa magnetfält, vilket skulle producera robotsystem som är ultramjuka, flexibla och kan anpassas för specifika funktioner.
"Vårt papper är kulmen på Zhus hårda arbete," sa Shum och Russell. "Nuvarande mjuka robotar är gjorda för material som poly(dimetylsiloxaner) som är bra för flexibilitet men har begränsningar, som till exempel i vilken utsträckning man kan komprimera dem. Att funktionalisera dem med specifika kemiska funktioner är viktigt för infångning och leverans av material, men är svårt. Aquabots övervinner dessa begränsningar."
Robotarna som introducerades av detta team av forskare monterades i vattenhaltiga miljöer. Detta innebär att de kan arbeta i vattenhaltiga miljöer och även kan anpassas för att utföra specifika uppgifter med vattenlösliga föreningar.
"Aquabots skapar nya möjligheter att replikera bioinspirerade material och funktioner, såsom dynamisk permeabilitet och uppdelning," sa Russell och Zhu. "Robotarna är helt vattenhaltiga, med vatten inuti och vatten utanför dem. De är lätta att funktionalisera för att vara biokompatibla, så det är inte svårt att föreställa sig biotillämpningar, d.v.s. inuti kroppen, där sådana konstruktioner kan vara användbara."
Aquabot-strukturerna som introducerades i teamets senaste artikel är mycket enkla, eftersom de är en prototyp som visar hur de kan sättas ihop. I framtiden kan dock samma process användas för att skapa mer komplexa strukturer som kan hantera mer avancerade uppgifter.
"Vår studie visar förmågan att konstruera robotar och utföra robotfunktioner baserade på vattenhaltig tillverkning, och inspirerar design av liknande vattenbaserade robotar för applikationer, såsom biomedicinsk mikromanipulation," sa Shum, Russell och Zhu. "Föreställ dig att ha en enkel rörformad struktur som har inbäddad funktionalitet som gör att du kan tillverka en specifik struktur i kroppen, en självmonterande robot som kan få delarna att gå genom väldigt smala kanaler in i ett större fack där de mjuka, flexibla delarna kan montera sedan själv för att utföra en uppgift, plocka sedan isär och tas bort,"
I framtiden kan Aquabots öppna spännande möjligheter för många verkliga biomedicinska och miljömässiga tillämpningar. De kan till exempel användas för att leverera läkemedel till specifika platser inuti människokroppen, för att biologiskt konstruera mänsklig vävnad och för att artificiellt utföra funktionerna i specifika biologiska system.
"Vi försöker nu att införliva en hydrogel i robotarnas sammansättning, så att vi kan uppnå fullt reversibla formförändringar," tillade Shum. "I våra nästa arbeten skulle det också vara värt att titta på andra egenskaper och funktioner som möjliggörs av Aquabot-plattformen, förutom den proof-of-concept mekanisk manipulation och kemiska reaktioner som visas i uppsatsen. Det skulle vara intressant att kombinera detta med andra mikrofluidiska och robotbaserade tillvägagångssätt för nya applikationer." + Utforska vidare
© 2022 Science X Network