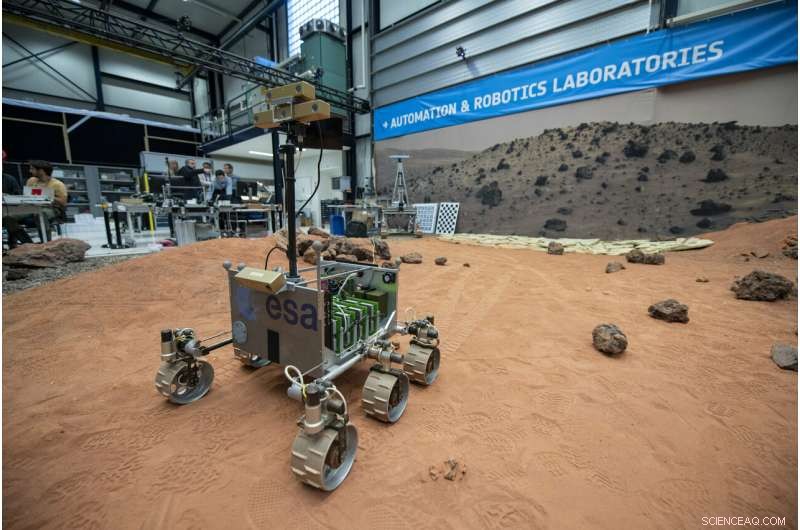
En halvskalig version av ExoMars rover, kallad ExoMars Testing Rover (ExoTeR), sett manövrera sig själv försiktigt genom de röda klipporna och sanden på 9x9 m Planetary Utilization Testbed, en del av ESA:s Planetary Robotics Laboratory i dess ESTEC tekniska center i Nederländerna, som ett test av autonom navigationsprogramvara avsedd för ESA:s ExoMars 2020-uppdrag till den röda planeten. Kredit:ESA–G. Porter, CC BY-SA 3.0 IGO
Navigationsprogramvara avsedd för ExoMars 2020-uppdraget till den röda planeten har klarat ett roverbaserat körprov på ESA:s "Mars Yard".
ESA:s ExoMars-rover kommer att köra till flera platser och borra ner till två meter under Mars yta på jakt efter ledtrådar för tidigare liv bevarade under jorden.
En halvskalig version av ExoMars rover, kallad ExoMars Testing Rover (ExoTeR), manövrerade sig försiktigt genom de röda stenarna och sanden på 9 x 9 m 'Planetary Utilization Testbed', med smeknamnet Mars Yard, del av ESA:s Planetary Robotics Laboratory vid ESTEC i Nederländerna.
Beräknar noggrant den vidare vägen, ExoTeR utvecklades med en hastighet av 2 m per minut – fortfarande flera gånger snabbare än den faktiska ExoMars-rovern kommer att köra, som kommer att avancera med 100 m per marsdag.
Det två dagar långa rovertestet utfördes av ESA:s robotingenjörer, sällskap av ett team från Frankrikes rymdorganisation CNES i Toulouse. De har mer än två decenniers erfarenhet av autonom navigering för planetariska rovers, som kulminerade i utvecklingen av "AutoNav"-sviten med programvara som stod för drivningen.
Under 2017 överfördes ExoTeR till ALTEC i Italien, platsen för ExoMars roverövervaknings- och kontrollcenter, för att tillåta kontrollteamet att träna med den avancerade rovern. I december, Rover återvände till ESTEC för en uppgradering av dess autonoma navigeringsalgoritm.
Navigationstestet följde, bekräftar att programvaran fungerade bra. Nästa ExoTeR kommer tillbaka till Italien, tillåter ALTEC-kontrollteamet att få erfarenhet av att arbeta med den extra funktionaliteten hos autonom navigering.
Det enorma avståndet från jorden till Mars motsvarar en signalfördröjning på mellan fyra och 24 minuter, gör direkt kontroll av ExoMars opraktisk. Istället kommer rovern att kunna fatta några av sina egna beslut.
"Istället för att skicka fullständiga riskfria banor för roveren att följa, autonom navigering tillåter oss att bara skicka den en målpunkt, " förklarar ESA:s robottekniker Luc Joudrier.
"Rovern skapar en digital karta över sin närhet och beräknar hur man bäst når den målpunkten. När den tittar på kartan försöker den placera rovern på alla dessa närliggande platser för att ta reda på om rovern skulle vara säker i var och en av dessa positioner – eller om stenarna är för höga eller för brant terräng.

En halvskalig version av ExoMars rover, kallad ExoMars Testing Rover (ExoTeR), används för att testa CNES-utvecklad programvara för autonom navigering i de röda stenarna och sanden på 9x9 m Planetary Utilization Testbed, en del av ESA:s Planetary Robotics Laboratory i dess tekniska center ESTEC i Nederländerna. Kredit:ESA–G. Porter, CC BY-SA 3.0 IGO
"Att arbeta från den lokala navigationskartan, Rover beräknar den säkra vägen mot målet och börjar röra sig längs ett segment av den beräknade vägen, i slutet av segmentet upprepar den samma mappningsprocess för att gå vidare.
"Det liknar en människa som går. Vi blickar framåt för att bestämma vart vi ska men när vi går kikar vi ner för våra fötter och byter vid behov kurs för att undvika hinder. När vi väl har valt en väg utan hinder, vi ser till att vi följer den vägen för att förbli säkra."
ExoTeR rover, som ExoMars rover själv, är utrustad med mastmonterade stereonavigeringskameror för digital höjdkartering. Och när den rullar framåt, den kontrollerar ständigt dess framsteg med hjälp av ett par kameror i det främre chassit.
Denna visionbaserade rörelsespårning fungerar bättre än att bara mäta svängen på roverns hjul eftersom den tillåter kontroller att ta hänsyn till eventuella hjulslirningar – rovers på Mars har tidigare fångats i djup sand, och fortsatt hjulsvängning kan faktiskt gräva in dem djupare.

ExoTeR rover, som ExoMars rover själv, är utrustad med mastmonterade stereonavigeringskameror för digital höjdkartering. Kredit:ESA–G. Porter, CC BY-SA 3.0 IGO
ExoTeR rover, komplett med uppdaterad programvara, är nu inställd på att återvända till ALTEC i Italien, vilket gör det möjligt för kontrollteamet att skaffa sig erfarenhet av den extra funktionaliteten av autonom navigering innan ExoMars flygprogramvara färdigställs.
ExoMars sista flygprogramvara kommer faktiskt att bära två uppsättningar av autonom navigationsprogramvara, med en annan utvecklad av Airbus i Stevenage, STORBRITANNIEN.
"Kombinationen ska ge rovern extra flexibilitet, " säger Luc. "Tanken är att man kan visa sig prestera bättre i svårare terräng, medan den andra kunde röra sig snabbare längs lättare mark."