DuAxel-rovern ses här delta i fälttester i Mojaveöknen. Den fyrhjuliga roveren är sammansatt av två Axel-robotar. Den ena delen förankrar sig på plats medan den andra använder en tjuder för att utforska annars otillgänglig terräng. Kredit:NASA/JPL-Caltech/J.D. Gammell
En rover rullar över stenig terräng, Dess fyra metallhjul slamrar fram tills de möter en till synes oöverstiglig fara:en brant sluttning. Nedan finns en potentiell mängd vetenskapsmål. Med en typisk rover, operatörerna skulle behöva hitta ett annat mål, men det här är DuAxel, en robot byggd för situationer precis som denna.
Rovern är faktiskt gjord av ett par tvåhjuliga rovers, var och en hette Axel. Att dela och erövra, rover stannar, sänker sitt chassi och förankrar det i marken innan det i huvudsak delas i två delar. Med den bakre halvan av DuAxel (förkortning för "dual-Axel") stadigt på plats, den främre halvan lossnar och rullar iväg på en enda axel. Allt som förbinder de två halvorna nu är ett tjuder som lossar när den ledande axeln närmar sig faran och rappeller nerför sluttningen, använda instrument stuvade i hjulnavet för att studera en vetenskapligt attraktiv plats som normalt sett skulle vara utom räckhåll.
Detta scenario utspelade sig i höstas under ett fälttest i Mojaveöknen, när ett litet team av ingenjörer från NASA:s Jet Propulsion Laboratory i södra Kalifornien satte den modulära rovern genom en rad utmaningar för att testa mångsidigheten i dess design.
"DuAxel presterade extremt bra på fältet, framgångsrikt visa sin förmåga att närma sig en utmanande terräng, ankare, och sedan lossa sin tjudrade Axel-rover, sa Issa Nesnas, en robottekniker på JPL. "Axel manövrerade sedan självständigt nerför branta och steniga sluttningar, använda sina instrument utan att behöva en robotarm."
Tanken bakom att skapa två enaxlade rovers som kan kombineras till en med en central nyttolast är att maximera mångsidigheten:Den fyrhjuliga konfigurationen lämpar sig för att köra långa sträckor över robusta landskap; den tvåhjuliga versionen erbjuder en smidighet som större rovers inte kan.
"DuAxel öppnar för tillgång till mer extrem terräng på planetariska kroppar som månen, Mars, kvicksilver, och möjligen några isiga världar, som Jupiters måne Europa, " tillade Nesnas.
Flexibiliteten byggdes med kraterväggar, gropar, scarps, ventiler, och annan extrem terräng på dessa olika världar i åtanke. Det är för att på jorden, några av de bästa platserna för att studera geologi finns i klipphällar och på klippor, där många lager av det förflutna är snyggt exponerade. De är svåra nog att nå hit, än mindre på andra himlakroppar.
Roverns rörlighet och förmåga att komma åt extrema platser är en lockande kombination för Laura Kerber, en planetgeolog vid JPL. "Det är därför jag tycker att Axel-rovern är ganska förtjusande, " sa hon. "Istället för att alltid försöka skydda sig mot faror som att falla eller välta, den är designad för att motstå dem."

Under samma fälttest, DuAxel rover delas upp i två enkelaxlade robotar så att man kan rappella ner för en sluttning som är för brant för konventionella rovers. Kredit:NASA/JPL-Caltech/J.D. Gammell
En tvåhjulig historia
Det radikala konceptet med två robotfordon som fungerar som ett har rötter i slutet av 1990-talet, när NASA började utforska idéer för modulära, omkonfigurerbar, självreparerande rovers. Detta inspirerade Nesnas och hans team på JPL att utveckla den robusta, flexibel tvåhjulig robot som skulle komma att kallas Axel.
De föreställde sig ett modulärt system:två axlar kunde docka på vardera sidan av en nyttolast, till exempel, eller tre Axel kunde docka till två nyttolaster, och så vidare, skapa ett "tåg" av Axel som kan transportera många nyttolaster. Detta koncept uppfyllde också kravet på "självreparerande" i NASA:s utmaning:Skulle en Axel misslyckas, en annan kunde ta dess plats.
Axel utveckling förblev fokuserad på modulära transporter fram till 2006, när satellitbilder av Mars yta avslöjade raviner i kraterväggar. Senare, upptäckten av vad som verkade vara säsongsbetonade utflöden av flytande vatten – mörka särdrag som kallas recurrent slope lineae – ökade intresset för att använda robotar för att ta prover. Forskare ville veta om raviner och återkommande sluttningslinjer orsakades av vattenflöden eller något annat.
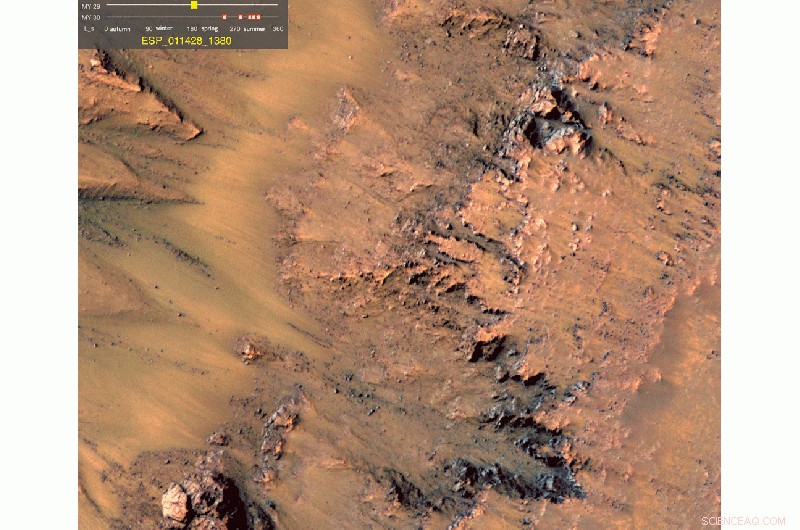
Under varma årstider på Mars, mörka strimmor som kallas "recurring slope lineae" förekommer ofta på kratersluttningar, som ses i denna serie observationer som fångats av HiRISE-kameran ombord på NASA:s Mars Reconnaissance Orbiter. DuAxel rover är designad för att rappellera till sådana otillgängliga områden för att studera dem. Kredit:NASA/JPL-Caltech/University of Arizona
Men backarna är för branta för en konventionell rover – även för Curiosity eller den snart landande Perseverance-roveren, båda är utformade för att korsa sluttningar på upp till 30 grader. Att utforska dessa funktioner direkt skulle kräva en annan typ av fordon.
Så Nesnas och hans team började utveckla en version av Axel som skulle kopplas till en lander, att använda tjudet inte bara för att gå ner för en kratersida eller en brant kanjonvägg, men också för att leverera ström och kommunicera med landaren. Dess hjul kan utrustas med extra höga grousers, eller trampbanor, för extra dragkraft, medan hjulnaven kunde hysa mikroskop, borrar, provsamlingsskopor, och annan instrumentering för att studera terrängen. Att vända, den tvåhjuliga axeln skulle bara rotera ett av sina hjul snabbare än det andra.
Intresset för konceptets flexibilitet har lett till en växande familj av tvåhjuliga konstruktioner, inklusive NASA JPL:s A-PUFFER och BRUIE, som utökar möjligheten till utforskning till nya destinationer och applikationer, inklusive under vatten på isiga världar.
Trots den tjudrade Axels mångsidighet, det fanns en anmärkningsvärd begränsning när den användes i kombination med en stationär landare:Landaren skulle behöva vara inom rappelleringsavstånd från kratersidan – vilket kräver en grad av landningsprecision som kanske inte är möjlig för ett planetariskt uppdrag.

Den tvåhjuliga Axeln tar sig nedför sluttningen medan den är bunden till sin motsvarighet förankrad ovanför sluttningen. Tjudet fungerar som ett slags klätterrep samtidigt som det ger kraft och ett kommunikationsmedel. Kredit:NASA/JPL-Caltech/J.D. Gammell
För att ta bort detta krav och öka rörligheten, teamet återgick till den ursprungliga modulära designen, anpassade den till den nya tjudrade Axel, och döpte den till DuAxel.
"Den viktigaste fördelen med att använda DuAxel är tydlig när du har osäkerhet på landningsplatsen, som vi gör på Mars, eller så vill du flytta till en ny plats för att rappella och utforska med Axel, sa Patrick Mcgarey, en robottekniker på JPL och DuAxel-teammedlem. "Det möjliggör frikörning från landningsplatsen och möjliggör tillfällig förankring i terrängen eftersom det i grunden är en transformerande robot gjord för planetarisk utforskning."
Medan DuAxel förblir en teknikdemonstration och väntar på att bli tilldelad en destination, dess team kommer att fortsätta finslipa sin teknologi; på det sättet, när tiden är inne, roboten skulle vara redo att rulla där andra rovers fruktar att trampa.