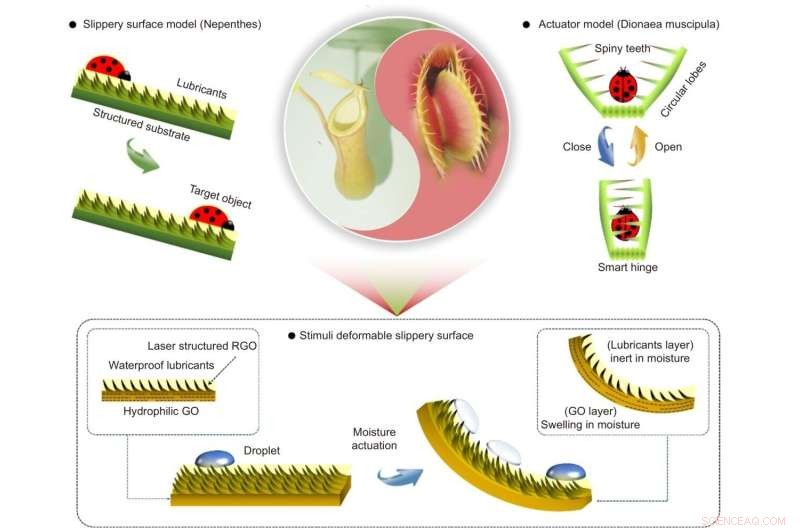
Grundkonceptet med hybrid bionisk fuktkänslig formformande hal yta inspirerad av köttätande växter i flera former. Nepenthes-kannaväxten fångar insekter passivt med hjälp av en hal yta med smörjmedel. Dionaea muscipula byter aktivt genom en stimuli-responsiv aktiveringsmekanism. Vi kombinerade de hala ytorna (passivt byte) och stimuli-responsiv aktivering (aktivt byte), så vi föreslog en hybrid bionisk fuktdeformerbar hala ytbaserad GO, som möjliggör både aktiv och passiv droppmanipulation. GO:grafenoxid; RGO, reducerad GO. Kredit:Compuscript Ltd
En ny publikation från Opto-Electronic Advances diskuterar hur köttätande växter inspirerar till smarta hala ytor och bioniska robotar.
Köttätande växter har inspirerat innovationer av avancerade stimuli-känsliga ställdon och hala ytor med smörjmedel. Det är dock fortfarande en utmaning att utveckla bioniska hybridenheter som kombinerar köttätande växters aktiva och passiva förmåga att fånga bytesdjur. Forskargruppen utvecklade en fuktkänslig hal yta som förändrar formen. De integrerade en hal yta med smörjmedel med ett LRGO/GO dubbelskiktsmanöverdon. Teamet förberedde en serie proof-of-concept ställdon, inklusive en smart grodtunga och en smart blomma, som demonstrerar aktiv/passiv fångst, droppmanipulation och avkänning.
Köttätande växter kan fånga och smälta små insekter genom sofistikerade aktiveringsmekanismer eller unik ytvätbarhet. Denna förmåga har inspirerat utvecklingen av artificiella smarta ytor/enheter för tekniska tillämpningar, såsom anti-isbildning, anti-biopåväxt, droppkondensering och dropphantering. Att efterlikna deras fångstbeteenden har lett till innovativa strategier för att designa syntetiska ytor, ställdon och robotar.
Generellt sett skiljer sig fångstmekanismen för köttätande växter mellan olika arter, som kan klassificeras i två kategorier:aktiv fångst och passiv fångst. Hybridbioniska enheter som kombinerar fördelarna med de två distinkta typerna av köttätande växter, med både positiva och passiva fångstförmåga, är dock fortfarande sällsynta. Kombinationen av Dionaea muscipula-inspirerade ställdon med en hal yta som efterliknar Nepenthes kannaväxt är fördelaktig för både ställdondesign och utvecklingen av en smart yta med supervätbarhet. Ändå är det utmanande att nå detta mål.
Femtosecond laser direct writing (FsLDW) induced photoreduction and simultaneous structuring to prepare a GO and LRGO bilayer actuator that enables dynamic deformation under moisture actuation. After that, a lubricant-infused slippery surface was integrated with the graphene actuator by immobilizing lubricant at the LRGO side through the capillary forces.
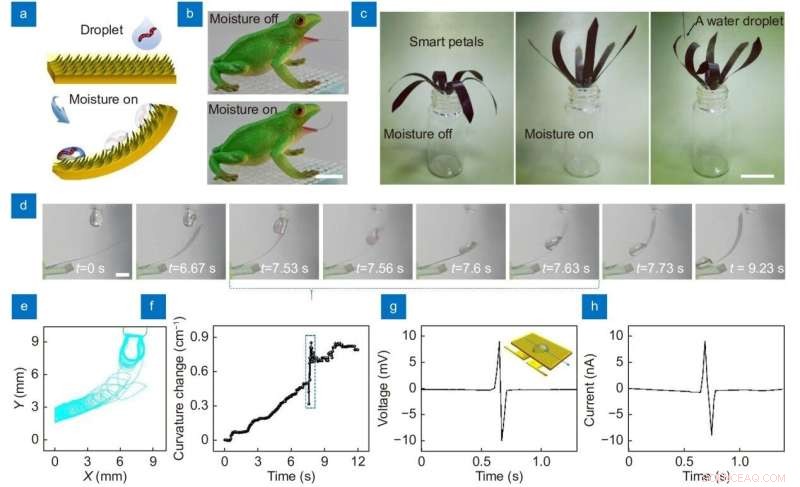
The manipulation of droplets on moisture responsive shape-morphing slippery surface. (a) Schematic illustration for the active and passive manipulation of a droplet containing live tubificidaes using the shape-morphing slippery surface. (b) The photographs of shape-morphing slippery frog tongue. The scale bar is 1.5 cm. (c) A smart water droplet harvesting flower. Every flower petal is made of the shape-morphing slippery surface (oil-LRGO/GO). The scale bar is 1.5 cm. (d) Moisture triggered active approach to water droplets containing live tubificidaes and the passive sliding behavior on the shape-morphing slippery surface. The scale bar is 0.5 cm. (e) The corresponding trajectory of the water droplet peripheries during the dynamic process. (f) The curvature changes of the shape-morphing slippery surface in (d). (g) The open-circuit voltage and (h) short-circuit current. Kredit:Compuscript Ltd
The two types of carnivorous plants demonstrate distinct strategies for trapping prey. Nepenthes pitcher plants catch insects through a passive trapping mechanism with the help of lubricants-infused slippery surfaces. In contrast, Dionaea muscipula performs an active trapping behavior through a sophisticated actuating mechanism. The concept of the hybrid bionic model is the combination of the two tapping behaviors within one synthetic smart surface here, which the research team called a stimuli deformable slippery surface.
Traditional stimuli-responsive actuators enable reversible deformation under external stimuli. They reveal the great potential for developing trapping robots. However, in most cases, simple bending deformation cannot trap insects because of the slow response to environmental stimuli or the lack of surface wettability control. The team combined the moisture-responsive actuator with a lubricant-infused slippery surface together. The combined effect of actuation and slippery property endows the oil-infused LRGO/GO film with enhanced trapping ability.
The research team demonstrated a moisture-responsive shape-morphing slippery surface that can contact droplets actively and let them slide away passively. Based on this hybrid bionic concept, a smart frog tongue that can catch and manipulate droplets containing live tubificidaes is prepared. Notably, the slippery surface can bend under moisture actuation, get in touch with the droplet, and let it slide to the bottom, demonstrating both active catching and passive trapping capabilities.
In conclusion, the in-situ integration of the lubricant-infused slippery surface with the bilayer actuator does not degrade the actuating performance. It also improves its deformation degrees under moisture actuation. The presence of an oil layer can entirely prevent the transmission of water molecules through the LRGO side, and selective water adsorption only occurs within the GO layer. As a result, the oil-LRGO/GO actuator demonstrated large deformation curvature, short response/recovery time, and improved stability. For practical applications, laser interference ablation that uses an interference effect for periodical patterning is more effective. The significance of this work lies in the fabrication of a shape-morphing slippery surface with hybrid bionic functionalities of both stimuli-responsive deformation and oil-lubricated slippery properties.
The combination of shape-morphing ability with the slippery surface benefits both actuating performance and the usefulness of a smart surface with super wettability. It leads to new applications, such as droplet collection, manipulation, and rainfall sensing. Moisture-responsive actuators can directly harness energy from naturally occurring or engineered evaporation from water. That can subsequently be converted to mechanical energy or electricity, such as weather-responsive architectural systems, smart textiles, and soft robots. The cross-species bio-inspired materials benefit both actuator design and the development of smart surfaces with super wettability. The moisture-responsive shape-morphing slippery surface reveals great potential for developing bionic robots. + Explore further