Att röra vid och ta tag i föremål är förvånansvärt komplexa processer, ett område där samtida robotar fortfarande är klumpiga. Huvudutredare Jukka Häkkinen, Ph.D., och postdoktoral forskare Jussi Hakala, D.Sc. (Teknik), har utvecklat en avbildningsmetod för mätning av mänsklig beröring.
"När människor fattar något, en mycket komplicerad subliminal beräkning sker om vilka muskler som behövs i processen, samt vilka neurala vägar som används för att kontrollera dem och med vilken intensitet. Inom psykologi, dessa hjärnmekanismer har studerats utförligt, "säger Jukka Häkkinen, psykolog och huvudutredare vid Helsingfors universitet. Han är hälften av paret bakom Grasp Sense -metoden.
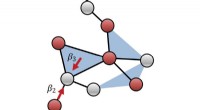
Med hjälp av värme- och djupkameror, Grasp Sense kan användas för att mäta värmesignaturen som finns kvar på föremålens yta genom människors beröring. Data som samlas in vid mänsklig beröring kan användas inom robotik. Än så länge, grepp och beröring har inneburit en utmaning för utvecklingen av robotar som ska användas, till exempel, inom logistik och sjukvård.
"Roboter behöver veta exakt objektets tredimensionella struktur, material- och viktfördelning, medan människor har förmågan att intuitivt greppa. Vårt mål är att överföra mänskliga färdigheter till robotar, "säger Jussi Hakala, en postdoktoral forskare och den andra utvecklaren av Grasp Sense. Hakalas forskning har fokuserat på 3D -bild- och displayteknik.
Problem inom robotik är relaterade till huruvida en robot kan behålla sitt grepp om ett objekt och, å andra sidan, undvik att krossa den. Ur perspektivet på framtidens vårdrobotar, denna aspekt blir allt viktigare.
"Deras grepp måste vara trevligt, orubblig och pålitlig, "konstaterar Häkkinen.
Tidigare, Häkkinen genomförde ett forskningsprojekt finansierat av Finlands Akademi som fokuserade på att mäta ögonrörelser under grepp om uppgifter.
"Jag undersökte hur olika greppuppgifter påverkar orienteringen av ögonrörelser. Termen" just in time selection "används i samband med ögonrörelser. Med andra ord, ögonen är fokuserade på att samla in den exakta informationen som krävs för de närmaste 500 millisekunderna, "förklarar Häkkinen.
Detta ledde till idén att också mäta de manuellt genomförda åtgärderna under att ta tag i uppgifter.
"Videobaserade metoder är inte tillräckligt noggranna, så min första tanke var att använda fingerfärg, "Häkkinen skrattar.
Senare, han övervägde att använda värmesignaturer kvar vid beröring, och flera applikationer för metoden.
Förutom robotik, Grasp Sense -metoden kan användas för att designa olika verktygsartiklar. Pekdata kan vara användbara vid utformning av objekt som måste vara trevliga, ergonomisk och exakt att använda.
Enligt Häkkinen, samma teknik kan också användas för att skapa modeller för sjukhushygien genom att installera kameror på taket på sjukhuset. Med hjälp av värmekameror, modeller som avslöjar de mest beröringskrävande ytorna kan skapas, gör det enklare och allt effektivare att hålla dem rena.