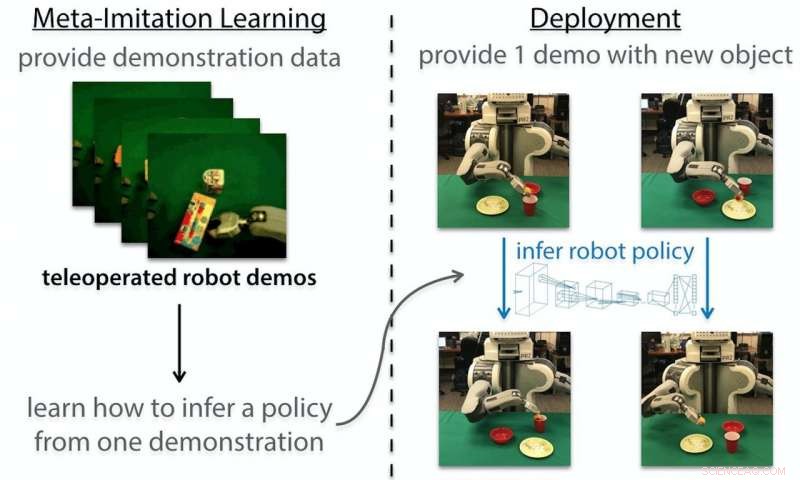
Tre steg för vår metaläringsalgoritm. Upphovsman:Tianhe Yu och Chelsea Finn
Ett team av forskare vid UC Berkeley har hittat ett sätt att få en robot att efterlikna en aktivitet den ser på en videoskärm bara en enda gång. I ett papper har de laddat upp till arXiv förtrycksserver, teamet beskriver hur de använde och hur det fungerar.
Robotar som lär sig att göra saker helt enkelt genom att se en människa utföra en handling en gång skulle kunna lära sig många fler nya handlingar mycket snabbare än vad som nu är möjligt. Forskare har arbetat hårt för att ta reda på hur de ska få det att hända.
Historiskt sett dock robotar har programmerats för att utföra åtgärder som att plocka upp ett objekt via en kod som uttryckligen beskriver vad som behöver göras och hur. Det är så de flesta robotar som gör saker som att montera bilar i en fabrik fungerar. Sådana robotar måste fortfarande genomgå en träningsprocess genom vilken de leds genom procedurer flera gånger tills de kan göra dem utan att göra misstag. På senare tid, robotar har programmerats att lära sig enbart genom observation - ungefär som människor och andra djur gör. Men sådant imiterande lärande kräver vanligtvis tusentals observationer. I denna nya insats, forskarna beskriver en teknik som de har utvecklat som gör att en robot kan utföra en önskad handling genom att se en människa göra det bara en enda gång.
För att uppnå denna bedrift, forskarna kombinerade imiterat lärande med en metaläringsalgoritm. Resultatet är något de kallar modell-agnostisk meta-lärande (MAML). Metallärande, forskarna förklarar, är en process genom vilken en robot lär sig genom att införliva tidigare erfarenhet. Om en robot visas video av en människa som plockar upp ett päron eller något liknande föremål, till exempel, och lägga den i en kopp, skål eller annat föremål, det kan få en "känsla" för ett mål. Om det i varje fall lärs att efterlikna beteendet på ett visst sätt, då "lär den" vad man ska göra när man observerar andra liknande beteenden. Således, när den ser en video av en person som plockar upp ett plommon och lägger det i en skål, den känner igen beteendet och kan översätta det till ett liknande beteende, som den sedan kan utföra.
© 2018 Tech Xplore