Kredit:YAKOBCHUK VIACHESLAV/Shutterstock
Att ha en självkänsla ligger i hjärtat av vad det innebär att vara människa. Utan det, vi kunde inte navigera, påverka varandra, empati eller i slutändan överleva i en ständigt föränderlig, andras komplexa värld. Vi behöver en självkänsla när vi vidtar åtgärder, men också när vi förutser konsekvenserna av potentiella handlingar, av oss själva eller andra.
Med tanke på att vi vill införliva robotar i vår sociala värld, det är inte konstigt att skapa en känsla av jag inom artificiell intelligens (AI) är ett av de ultimata målen för forskare inom området. Om dessa maskiner ska vara våra vårdare eller följeslagare, de måste oundvikligen ha en förmåga att sätta sig i våra skor. Medan forskare fortfarande är långt ifrån att skapa robotar med en människoliknande självkänsla, de kommer närmare.
Forskare bakom en ny studie, publiceras i Vetenskapsrobotik , har utvecklat en robotarm med kunskap om dess fysiska form – en grundläggande självkänsla. Detta är ändå ett viktigt steg.
Det finns ingen perfekt vetenskaplig förklaring av vad som exakt utgör den mänskliga självkänslan. Nya studier från neurovetenskap visar att kortikala nätverk i de motoriska och parietala områdena i hjärnan aktiveras i många sammanhang där vi inte rör oss fysiskt. Till exempel, höra ord som "pick or kick" aktiverar de motoriska områdena i hjärnan. Det gör också att observera någon annan agera.
Hypotesen som följer av detta är att vi förstår andra som om vi själva agerade – ett fenomen som forskare kallar "förkroppslig simulering". Med andra ord, vi återanvänder vår egen förmåga att agera med våra kroppsliga resurser för att tillskriva andras handlingar eller mål betydelser. Motorn som driver denna simuleringsprocess är en mental modell av kroppen eller jaget. Och det är precis vad forskare försöker återskapa i maskiner.
Det fysiska jaget
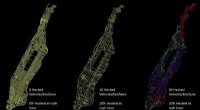
Teamet bakom den nya studien använde ett nätverk för djupinlärning för att skapa en självmodell i en robotarm genom data från slumpmässiga rörelser. Viktigt, AI:n matades inte med någon information om dess geometriska form eller underliggande fysik, den lärde sig gradvis när den rörde sig och stötte på saker – på samma sätt som en baby lär sig om sig själv genom att observera sina händer.
Den kan sedan använda denna självmodell som innehåller information om dess form, storlek och rörelse för att göra förutsägelser relaterade till framtida handlingstillstånd, som att plocka upp något med ett verktyg. När forskarna gjorde fysiska förändringar av robotarmen, motsägelser mellan robotens förutsägelser och verkligheten fick inlärningsslingan att börja om, gör det möjligt för roboten att anpassa sin självmodell till sin nya kroppsform.
Medan den aktuella studien använde en enda arm, liknande modeller utvecklas också för humanoida robotar genom processen av självutforskning (dubbad sensorisk motorisk babbel) – inspirerad av studier inom utvecklingspsykologi.

Vi ser likadana ut, men vi vet att vi är olika. Kredit:Phonlamai Photo/Shutterstock
Det kompletta jaget
Ändå, en robotisk självkänsla kommer inte i närheten av människan. Som en lök, vårt jag har flera mystiska lager. Dessa inkluderar en förmåga att identifiera sig med kroppen, att vara belägen inom den fysiska gränsen för den kroppen och uppfatta världen ur den kroppens visuo-spatiala perspektiv. Men det involverar också processer som går utöver detta, inklusive integration av sensorisk information, kontinuitet i tiden genom minnen, handlingsfrihet och ägande av ens handlingar och integritet (folk kan inte läsa våra tankar).
Även om strävan efter att skapa en robotisk självkänsla som omfattar alla dessa flera lager fortfarande är i sin linda, byggstenar som kroppsschemat som visas i den nya studien håller på att skapas. Maskiner kan också göras för att imitera andra och förutsäga andras avsikter eller anta deras perspektiv. Sådana utvecklingar, tillsammans med växande episodiskt minne, är också viktiga steg mot att bygga socialt kognitiva robotkompisar.
Intressant, denna forskning kan också hjälpa oss att lära oss mer om människans självkänsla. Vi vet nu att robotar kan anpassa sin fysiska självmodell när förändringar görs i deras kroppar. Ett alternativt sätt att tänka på detta är i samband med verktygsanvändning av djur, där olika yttre föremål är kopplade till kroppen (pinnar, gafflar, svärd eller smarta telefoner).
Avbildningsstudier visar att nervceller som är aktiva under handgrepp hos apor också blir aktiva när de greppar med en tång, som om tången nu vore fingrarna. Verktyget blir en del av kroppen och den fysiska självkänslan har förändrats. Det liknar hur vi betraktar avataren på skärmen som oss själva när vi spelar videospel.
En spännande idé som ursprungligen föreslogs av den japanske neuroforskaren Atsushi Iriki är att förmågan att bokstavligen införliva yttre föremål i ens kropp och förmågan att objektivera andra kroppar som verktyg, är två sidor av samma mynt. Anmärkningsvärt, denna suddiga distinktion kräver uppkomsten av ett virtuellt koncept – jaget – för att fungera som platshållare mellan subjektet/skådespelaren och objekten/verktygen. Att justera jaget genom att lägga till eller ta bort verktyg kan därför hjälpa oss att undersöka hur detta jag fungerar.
Robotar som lär sig att använda verktyg som en förlängning av sina kroppar är fertila testbäddar för att validera sådana nya data och teorier från neurovetenskap och psykologi. På samma gång, forskningen kommer att leda till utveckling av mer intelligenta, kognitiva maskiner som arbetar för och med oss inom olika områden.
Kanske är detta den viktigaste aspekten av den nya forskningen. Det sammanför slutligen psykologi, neurovetenskap och teknik för att förstå en av de mest grundläggande frågorna inom vetenskapen:Vem är jag?
Den här artikeln är återpublicerad från The Conversation under en Creative Commons-licens. Läs originalartikeln.