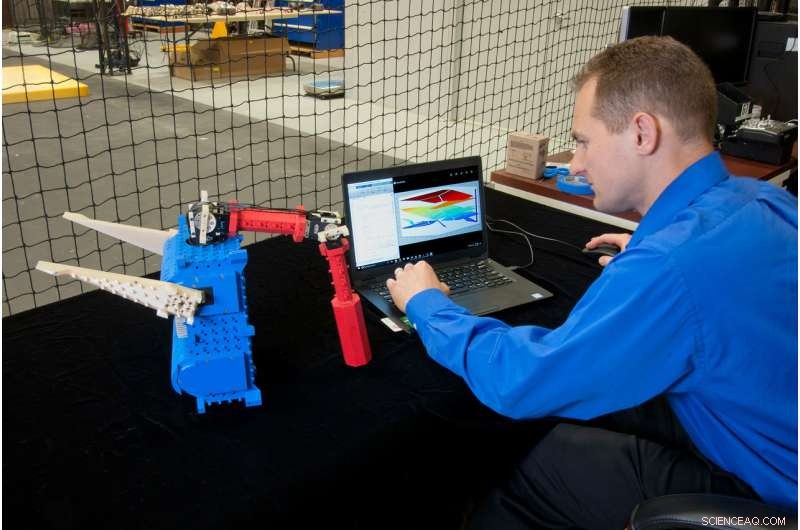
Dr Chad Kessens, en robotist vid US Army Research Laboratory vid Aberdeen Proving Ground, Md., kommer med innovativa idéer för framtida militärrobotar. Kredit:Army Research Laboratory
Forskare vid U.S. Army Research Laboratory och Johns Hopkins University Applied Physics Laboratory har utvecklat programvara för att säkerställa att om en robot faller, den kan ta sig upp igen, vilket innebär att framtida militära robotar kommer att vara mindre beroende av sina soldathanterare.
Baserat på feedback från soldater på en arméutbildning, ARL-forskaren Dr. Chad Kessens började utveckla mjukvara för att analysera om en given robot kunde komma sig "på fötterna igen" från valfri riktning.
"En soldat sa till mig att han värderade sin robot så mycket, han klev ur sitt fordon för att rädda roboten när han inte kunde vända den, sade Kessens. Det är en historia jag aldrig vill höra igen.
Forskare från Navy PMS-408 (Expeditionary Missions) och dess tekniska arm, Indian Head Explosive Ordnance Disposal Technology Division, hålla med. De slog sig ihop med JHU/APL och huvudentreprenören, Northrop Grumman Remotec, att utveckla det avancerade robotsystemet för bortskaffande av sprängämnen, eller AEODRS, en ny familj av EOD-robotsystem med en modulär arkitektur för öppna system. En lätt ryggsäcksbar plattform, vilket är inkrement ett av programmet, förväntas gå i produktion senare i år. Ett kritiskt krav på programmet är att robotarna måste kunna räta upp sig själv.
"Dessa robotar finns för att hålla soldater ur vägen, "sade Reed Young, Robotics and Autonomy Program Manager på JHU/APL. "Självrättande är en kritisk förmåga som bara kommer att främja detta syfte."
För att utvärdera AEODRS-systemets förmåga till självrätt, JHU/APL samarbetade med ARL för att utnyttja programvaran Kessens utvecklade. Teamet kunde utöka sin förmåga till robotar med ett större antal leder (eller frihetsgrader) på grund av JHU/APL-forskaren Galen Mullins expertis inom adaptiva provtagningstekniker.
"Analysen jag har arbetat med tittar på alla möjliga geometrier och riktningar som roboten kan hamna i, ", sa Kessens. "Problemet är att varje ytterligare led ger en dimension till sökutrymmet - så det är viktigt att leta på rätt ställen för stabila tillstånd och övergångar. Annat, sökningen kan ta för lång tid."

Forskare utforskar nya tekniker med hjälp av plattformen Advanced Explosive Ordnance Disposal Robotic System Increment 1. Kredit:Arméns forskningslaboratorium
Kessens sa att Mullins arbete är det som gjorde det möjligt för analysen att fungera effektivt för att analysera system med högre grad av frihet. Medan Kessens arbete avgör vad man ska leta efter och hur, Mullins kommer på var han ska leta."
"Denna analys möjliggjordes av vårt nyutvecklade sortimentsmotståndsplaneringsverktyg, eller RAPT, ett ramverk för att testa autonoma och robotsystem, ", sa Mullins. "Vi utvecklade ursprungligen programvaran för undervattensfarkoster, men när Tchad förklarade sin inställning till problemet med självupprättande, Jag såg direkt hur dessa tekniker kunde fungera tillsammans."
Han sa att nyckeln till denna programvara är en adaptiv samplingsalgoritm som letar efter övergångar.
"För detta arbete, vi letade efter tillstånd där roboten kunde övergå från en stabil konfiguration till en instabil, vilket får roboten att välta, " Mullins förklarade. "Mina tekniker kunde effektivt förutsäga var dessa övergångar kan vara så att vi kunde söka utrymmet effektivt."
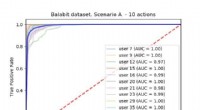
I sista hand, teamet kunde utvärdera AEODRS-systemens åtta frihetsgrader och fastställde att de kan rätta sig på plan mark oavsett vilket initialtillstånd det befinner sig i. Analysen genererar också rörelseplaner som visar hur roboten kan omorientera sig. Teamets resultat finns i "Utvärdering av robotens självrättande förmågor med hjälp av adaptivt provtagning, " publicerad i IEEE's Robotik och automationsbrev i Augusti.
Utöver utvärderingen av en specifik robot, Kessens ser analysramverket som viktigt för militärens förmåga att jämföra robotar från olika leverantörer och välja den bästa för inköp.
"Armén och marinen vill ha robotar som kan rätta sig själv, men vi arbetar fortfarande med att förstå och utvärdera vad det betyder, "Sade Kessens. "Självrätt under vilka förhållanden? Vi har utvecklat en metrisk analys för att utvärdera en robots förmåga att självrätta upp på sluttande plan mark, och vi skulle till och med kunna använda det som ett verktyg för att förbättra robotdesign. Vårt nästa steg är att bestämma vad en robot är kapabel till i ojämn terräng."