Focal-plane Sensor-Processor Arrays (FPSP) är parallella bearbetningssystem, där varje pixel har ett behandlingselement. Kredit:Saeedi et al.
En stor grupp forskare vid Imperial College London, University of Edinburgh, University of Manchester, och Stanford University har nyligen samarbetat kring ett projekt som undersöker tillämpningen av lokalisering och kartläggningsverktyg i realtid för robotik, autonoma fordon, virtuell verklighet (VR) och förstärkt verklighet (AR). Deras papper, publicerad på arXiv och IEEE:s förfarande , beskriver utvecklingen av metoder för att utvärdera algoritmer för samtidig lokalisering och kartläggning (SLAM), samt en rad andra intressanta verktyg.
"Syftet med vårt arbete var att ta med expertforskare från datorseende, hårdvara och kompilatorsamhällen tillsammans för att bygga framtida system för robotik, VR/AR, och sakernas internet (IoT), " sa forskarna till Tech Xplore i ett e-postmeddelande. "Vi ville bygga robusta datorseendesystem som kan uppfatta världen med mycket låg energibudget men med önskad noggrannhet; vi är intresserade av uppfattningen per Joule-mått."
Forskarna som var involverade i projektet kombinerade sin kompetens och expertis för att sätta ihop algoritmer, arkitekturer, verktyg, och programvara som krävs för att leverera SLAM. Deras resultat kan hjälpa dem som använder SLAM inom en mängd olika områden att välja och konfigurera algoritmer och hårdvara som kan uppnå optimala prestandanivåer, noggrannhet, och energiförbrukning.
"En viktig punkt i projektet är idén om tvärvetenskaplig forskning:Att föra samman experter från olika områden kan möjliggöra fynd som inte skulle vara möjliga annars, " sa forskarna.
SLAM-algoritmer är metoder som kan konstruera eller uppdatera en karta över en okänd miljö och samtidigt hålla reda på en viss agents plats i den. Denna teknik kan ha användbara applikationer inom ett antal områden, till exempel vid utveckling av autonoma fordon, robotik, VR, och AR.
I deras studie, forskarna utvecklade och utvärderade flera verktyg, inklusive programvara för kompilator och körning, samt hårdvaruarkitekturer och datorsynalgoritmer för SLAM. Till exempel, de utvecklade benchmarking -verktyg som gjorde det möjligt för dem att välja en korrekt dataset och använda den för att utvärdera SLAM -algoritmer.
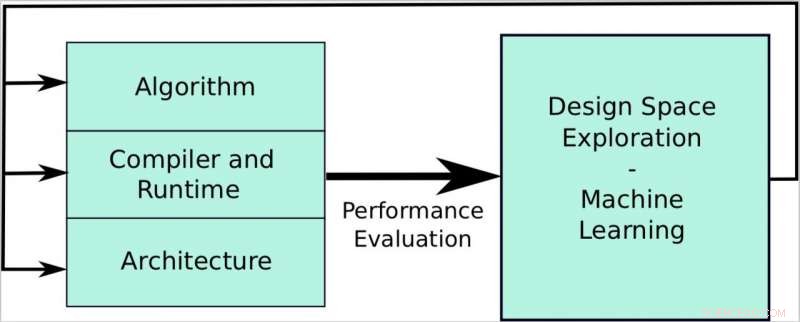
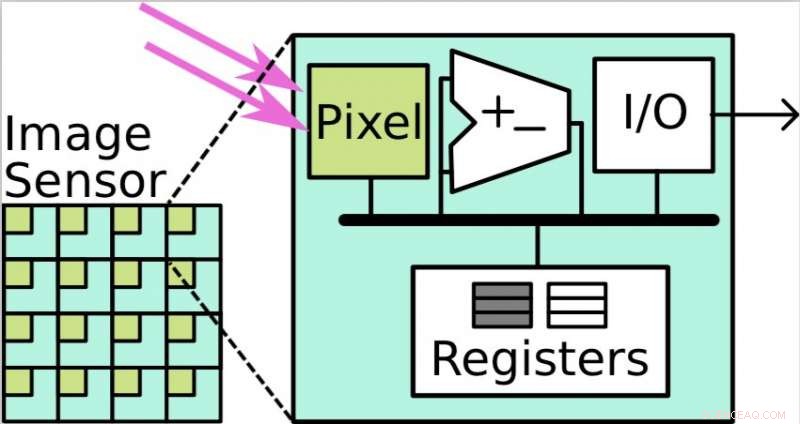
Syftet med uppsatsen är att skapa en pipeline som anpassar kraven på datorsyn med hårdvarukapacitet. Tidningens fokus ligger på tre lager:algoritmer, kompilator och körtid, och arkitektur. Målet är att utveckla ett system som tillåter oss att uppnå kraft- och energieffektivitet, förbättring av hastighet och körtid, och noggrannhet/robusthet i varje lager och även holistiskt genom designutforskning av utrymme och maskininlärningsteknik. Kredit:Saeedi et al.
Till exempel, de använde ett program som heter SLAMBench för att utvärdera KinectFusion -algoritmen på flera hårdvaruplattformar och SLAMBench2 för att jämföra olika SLAM -algoritmer. Forskarna utökade också KinectFusion-algoritmen, så att den kan användas i robotvägplanering och navigeringsalgoritmer; kartlägga både upptaget och ledigt utrymme i miljön.
"Det här projektet var väldigt brett, Således, fynden var ganska många, " sa forskarna. "Till exempel, vi har visat praktiska tillämpningar där ungefärlig beräkning kan spela en stark roll för att uppnå uppfattning per Joule, till exempel SLAMBench-applikationen utvecklad för smarta telefoner. Ungefärlig beräkning är tanken att slutföra en beräkningsuppgift med ett givet acceptabelt fel, och så producera en ungefärlig lösning. "
Projektet utforskade användningen av ny avkänningsteknik, såsom focal-plane sensor-processor arrays, som visade sig ha låg strömförbrukning och höga bildhastigheter. Dessutom, det undersökte tillämpningen av statisk, dynamisk, och schemaläggningsprogram för hybridprogram på flerkärniga system, speciellt för KinectFusion-algoritmen.
"Vår forskning har redan en inverkan på många områden som robotik, VR/AR, och IoT, där maskiner alltid är på och kan kommunicera och utföra sina uppgifter med rimlig noggrannhet, utan avbrott, med mycket liten strömförbrukning, "sa forskarna.
Detta omfattande projekt har lett till flera viktiga fynd, och till utvecklingen av nya verktyg som till stor del kan underlätta implementeringen av SLAM inom robotik, VR, AR, och autonoma fordon.
Studien gav också ett antal bidrag inom ramen för hårdvarudesign, till exempel, utveckla profilverktyg för att lokalisera och utvärdera flaskhalsar för prestanda i både inbyggda och hanterade applikationer. Forskarna presenterade ett fullständigt arbetsflöde för att skapa hårdvara för datorvisionsapplikationer, som skulle kunna tillämpas på framtida plattformar.
"Vi kommer nu att använda våra resultat för att bygga ett integrerat system för robotik och VR/AR, "sa forskarna." Till exempel, Dr Luigi Nardi vid Stanford University fortsätter sin forskning genom att tillämpa liknande koncept på Deep Neural Networks (DNN), d.v.s. optimera hårdvara och mjukvara för att köra DNN effektivt, medan Dr Sajad Saeedi vid Imperial College London tittar på alternativa analoga teknologier som focal-plane sensor-processor arrays (FPSPs) som tillåter DNN att köras med mycket höga bildhastigheter, ordning på 1000-tals FPS, för alltid påkopplade enheter och autonoma bilar. "
© 2018 Tech Xplore