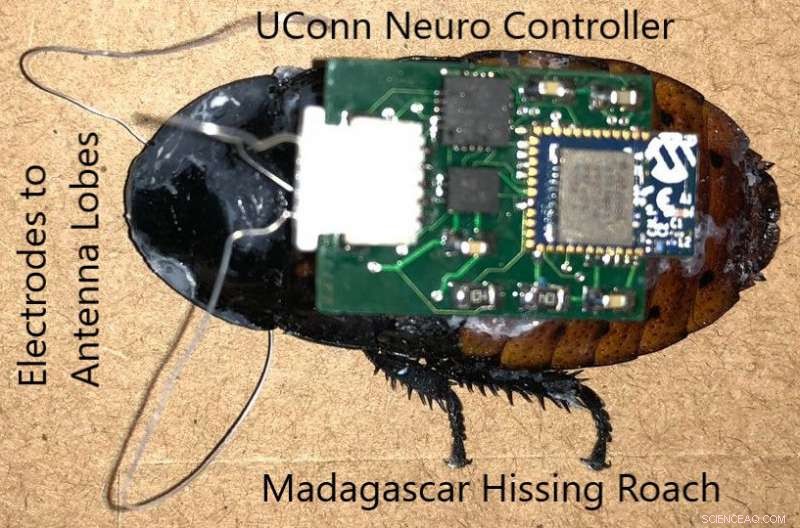
En kackerlacka med en inopererad neurokontroller. Kredit:Dutta Lab
En kackerlacka som inte är större än ett stort gem susar över golvet i Abhishek Duttas labb vid University of Connecticut.
Vissa forskare kan bli chockade över att se en sådan ökänd besökare som ockuperar deras forskningsutrymme.
Men inte Dutta. Han tittar intensivt på när mörten rör sig till vänster, och sedan höger, sedan vänster igen, när den korsar det svala klinkergolvet. Hans intresse är välgrundat, för det är han som initierar den lilla varelsens rörelser med en liten handhållen enhet cirka 15 fot bort.
Den väsande kackerlackan från Madagaskar i detta labb är inte vilken gammal medlem som helst av ordningen Blattodea. Det är en robot-mörthybrid, en fast biologisk insekt – en cyborg om du så vill – och dess framtida högteknologiska bröder kan en dag rädda ditt liv.
"Användningen av insekter som plattformar för små robotar har otroligt många användbara tillämpningar, från sök och räddning till nationellt försvar, säger Dutta, en biträdande professor i el- och datateknik som är specialiserad på styrsystemoptimering och cyberfysiska system.
Kackerlackarobotar är inte nya, dock. Forskare har undersökt biorobotplattformar för insekter under större delen av det senaste decenniet. Men att bygga robotsystem i sådan miniatyrskala är inte lätt, och tekniken verkar bara fungera ungefär halva tiden.
I en tidning som snart kommer att publiceras i Proceedings of the Conference on Cognitive Computational Neuroscience , Philadelphia 2018, Dutta, och undergraduate Evan Faulkner, en junior som arbetar i sitt labb, rapportera deras skapande av en mikrokrets som de säger tillåter mer tillförlitlig och exakt kontroll av robotinsektens rörelse.
För att förbättra kontrollen av insekten, Duttas mikrokrets innehåller en 9-axlig tröghetsmätenhet som kan detektera mörtens sex grader av fri rörelse, dess linjära och rotationsacceleration, och dess kompasskurs. En annan funktion som Dutta och Faulkner lade till är den omgivande temperaturen som omger varelsen, eftersom tester har visat att temperaturen i miljön som en mört rör sig i kan påverka hur och vart insekten rör sig. Kackerlackor, för protokollet, är mer benägna att gå på promenader när det är varmt.
Mikrokretsen som Dutta och Faulkner skapade är en del av en liten elektronisk "ryggsäck" som kan fästas på baksidan av en kackerlacka. Ledningar från enheten är fästa på insektens antennlober. En liten Bluetooth-sändare och mottagare gör att en närliggande operatör kan kontrollera mörtens rörelser via en vanlig mobiltelefon. Att skicka små elektriska impulser till nervvävnaden i insektens högra eller vänstra antennlob får insekten att tro att den har stött på ett hinder. En liten laddning till vänster antenn gör att insekten rör sig bort åt höger. Likaså, en laddning som skickas till höger antenn gör att insekten rör sig åt vänster. Det är omdefinierad servostyrning.
Medan andra labb har utvecklat liknande kontrollsystem, UConns mikrokrets är utmärkande genom att den ger operatörerna en större grad av kontroll över insektens rörelser, realtidsåterkoppling av insektens neuromuskulära svar på konstgjorda stimuli, och flerkanalsvägar för att stimulera insektens nervvävnad. Resultatet är ett mer informerat och exakt kontrollsystem.
UConn-systemets mikrokontroller och inbyggda potentiometer låter operatörer variera utspänningen, frekvens, och cykel av stimuli som skickas till insekten. (En potentiometer, om du undrar, är det rätta namnet på en elektronisk enhet som justerar spänningen. Det är det som gör ljusdimmerbrytare möjliga, och låter dig justera volymen på din stereo.) Stimulansen som resulterade i det mest robusta svaret från kackerlackan var runt 1,2V amplitud, 55 Hz frekvens, och 50 procents arbetscykel. (Inga mörtar skadades av dessa experiment, förresten.)
En intressant godbit forskarna märkte var att mörtens rörelser åt vänster eller höger som svar på konstgjord stimulering minskade i intensitet efter den första stimulansen. Så om mörten gjorde en hård vänster efter att den första elektroniska pulsen träffade dess högra antennlob, dess tur var mindre dramatisk med varje efterföljande puls till den loben. Forskarna är inte säkra på varför detta händer, men det är praktisk information att veta när det är du som styr.
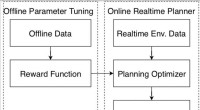
Viktigast, Dutta säger, systemet gjorde det möjligt för användare att använda realtidsfeedbacken som skickades över Bluetooth-systemet för att ställa in specifika parametrar för att stimulera insektens antennlober, och det gjorde att de kunde styra insekten i önskad riktning.
"Vår mikrokrets tillhandahåller ett sofistikerat system för att inhämta realtidsdata om en insekts kurs och acceleration, som tillåter oss att extrapolera dess bana, " säger Dutta. "Vi tror att denna avancerade slutna slinga, modellbaserat system ger bättre kontroll för precisionsmanövrering, och övervinner några av de tekniska begränsningarna som för närvarande plågar dagens mikrorobotar."
Även om den nya mikrokretsen verkligen är ett steg framåt för robotinsektsteknologi, Dutta medger att mycket mer forskning behövs. Insektsdrivna biobotar, Du kanske säger, är fortfarande i larvstadiet. Pågående framsteg inom design av mikrohårdvara och mikrokontrollsystem kan leda till en ny generation av enheter som fungerar ännu bättre.