Kredit:Petit et al.
Forskare vid Ecole Centrale de Lyon har nyligen tagit fram en ny utvecklingsram inspirerad av människors långtidsminne och resonemangsmekanismer. Detta ramverk, beskrivs i en artikel som presenterades på IEEE ICDL-Epirob i Tokyo och förpublicerad på arXiv, tillåter robotar att autonomt optimera hyperparametrar som är inställda från vilken handlings- och/eller visionmodul som helst, som behandlas som en svart låda.
På senare år har forskare har byggt robotar som kan utföra en mängd olika uppgifter. Ändå, miljön där dessa robotar arbetar är ofta något begränsad. Detta beror på att inom robotik, de flesta algoritmer skapas och optimeras manuellt av mänskliga experter för att förutse de potentiella utmaningar som roboten kan stöta på i en given situation.
"Dock, när man hanterar osäkerheter, till exempel, när roboten kommer att behöva hantera nya föremål ofta under sin livstid, att alltid förlita sig på ytterligare program och optimering från mänskliga ingenjörer är inte lönsamt:roboten måste lära sig själv, "Dr Maxime Petit, en av forskarna som genomförde studien, berättade för TechXplore. "Vi vill förse robotar med inlärningsmekanismer för att de ska vara autonoma och anpassa sig till olika situationer, även när dessa inte förutses."
Att utveckla robotar som automatiskt anpassar sig till olika situationer kan ha ett antal användbara tillämpningar, till exempel, inom ramen för industriell robotik, där robotarmar behöver plocka upp okända föremål från homogena bulks.
Kredit:Petit et al.
"Vi ville att roboten autonomt skulle optimera parametrarna för en visionbaserad gripprogramvara (Kamido av Siléane) för varje objekt på mindre än några timmar, Petit förklarade. "För att göra det, vi använde en utvecklingsram som syftar till att replikera hur barn lär sig om världen. Särskilt, vi vill dra fördel av likheten mellan objekt för att påskynda inlärningsprocessen genom att överföra kunskap om en uppgift till en annan liknande."
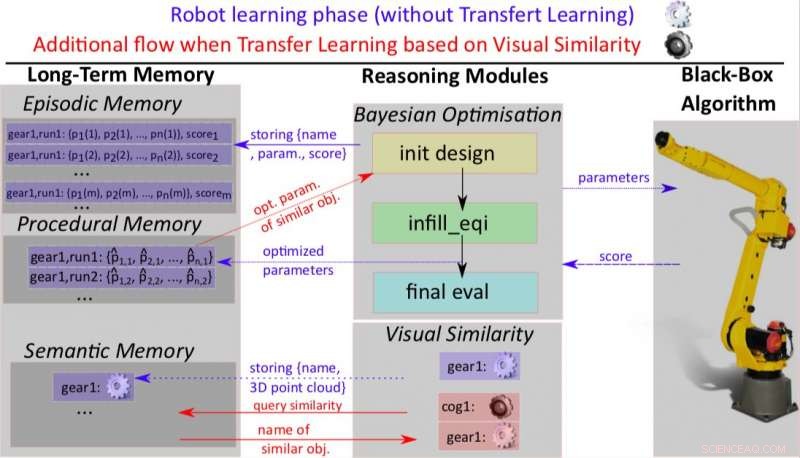
Den utvecklingsram som presenteras av Petit och hans kollegor syftar till att möjliggöra livslångt och öppet lärande av nya färdigheter i robotar genom en process som liknar den som observeras hos mänskliga barn. För att uppnå detta, deras ram inkluderar ett långtidsminne där robotar lagrar sina erfarenheter, samt resonemangsmöjligheter som gör att de kan identifiera användbara element i sina lagrade data.
"Den Bayesianska optimeringsmetoden fungerar som en smart "trial and error"-strategi:Roboten uppskattar vilken uppsättning parametrar det är bäst att utvärdera baserat på resultaten från den tidigare utvärderingen, Petit förklarade. Kort sagt, denna metod guidar roboten effektivt i att utforska parametrar kring värden som inte testades, men också mot värderingar som har hög potential."
Trots effektiviteten av denna teknik, forskarna ville öka konvergensen av robotens lärande för att uppnå bättre optimering. Traditionella Bayesianska optimeringsmetoder var därför inte önskvärda, som med dessa, robotens inlärning börjar från början för varje nytt objekt den möter. För att komma till rätta med denna begränsning, forskarna använde en strategi baserad på synlikhet.
Kredit:Petit et al.
"Vi ville dra nytta av den tidigare erfarenheten av roboten för olika men liknande uppgifter, sade Petit. när man konfronteras med ett nytt föremål, vi tvingar roboten att initialt utforska lösningar som var optimerade för liknande objekt. Till exempel, om roboten vet hur man tar tag i en apelsin och nu måste fatta ett äpple, vi tvingar roboten att ta tag i äpplet med strategin "gripa apelsin". Vi gör det genom att fråga den visuella likhetsmodulen vilka objekt som liknar de nya, och extrahera de bästa lösningarna för dessa liknande objekt från långtidsminnet."
Forskarna utvärderade sitt ramverk i en simuleringsmiljö. De fann att strategin för överföringsinlärning baserad på visuell likhet var mycket mer fördelaktig än amnesisk inlärning, där robotar lär sig strategier från grunden varje gång de utför en ny uppgift.
Än så länge, utvecklingsramar har främst undersökts inom ramen för social robotik, till exempel, hjälpa till att anpassa hjälpen från sociala robotar till användarnas behov eller preferenser.
"Att använda detta ramverk i en industriell robotteknik ledde till övertygande resultat, antyder att områdena social och industriell robotik har mycket att lära av varandra, "Sade Petit. "En annan intressant aspekt av vår studie är att ramverket optimerar en "black box"-algoritm, vilket gör att vi inte vet något om hur det fungerar. Vi tillhandahåller parametrar till det, och i utbyte, vi får poäng för deras kvalitet. Detta innebär att det också kan tillämpas på olika appar och algoritmer (även utanför robotområdet) som behöver finjusteras ofta."

Robot Kamido av Siléane
Forskarna undersöker nu sätt på vilka robotar kan överföra kunskap om objekt som förvärvats under simuleringar till verkliga uppgifter som involverar samma objekt. Detta skulle ytterligare förbättra en robots effektivitet, låter den lära sig nya saker virtuellt och sedan tillämpa dem i verkligheten.
"Optimeringen av parametrar för objekt som delar fysiska egenskaper kan också leda till uppkomsten av ett sådant koncept för specifika robotar, " tillade Petit. "Till exempel, en robot kan lära sig att en 'platta, ''tung, ''lång, ' etc. objekt måste greppas med specifika värden för en delmängd av parametrar. Detta kan användas för att förbättra interaktioner mellan människa och robot och lärande med naturligt språk, till exempel, med arbetare som hjälper roboten genom att ge en liten beskrivning av de nya föremålen som ska hanteras."
© 2018 Tech Xplore