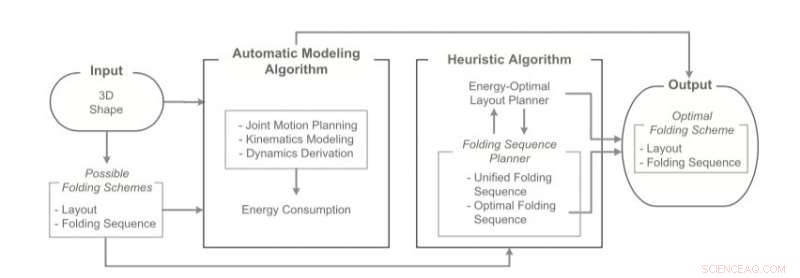
Översikt över energioptimal omkonfigurationsplanering för modulära robotar med två tillvägagångssätt, en automatisk modelleringsalgoritm och en heuristisk algoritm. Kredit:Yao et al.
Forskare vid Reconfigurable Robotics Lab (RRL) vid École Polytechnique Fédèrale de Lausanne (EPFL) har nyligen utvecklat ett nytt tillvägagångssätt för omkonfigurering av modulära robotar som är inspirerad av konsten att origami. Den här metoden, beskrivs i en tidning publicerad i Sage's International Journal of Robotics Research , eliminerar anslutningsförändringar under ett systems transformation.
Modulära omkonfigurerbara robotar är mångsidiga system som kan omvandla sin form för att utföra olika uppgifter i en mängd olika miljöer. Detta kan vara särskilt användbart i uppdragsbaserade inställningar, som rymden, erkännande, provtagning, eller sök- och räddningsinsatser. I dessa fall, konventionella robotar med fast morfologi kan kämpa för att anpassa sig till komplexa och osäkra miljöer, medan modulära robotsystem autonomt kan omkonfigurera och anpassa sig till nya omständigheter.
Omkonfigurerbarheten av modulära system uppnås genom att ändra morfologin för deras övergripande struktur, samt genom att ansluta och koppla bort sina moduler. Trots de anmärkningsvärda fördelarna med att använda dessa system, det stora antalet individuella komponenter och frihetsgrader (DoFs) som är involverade gör det mycket utmanande att ändra sin konfiguration.
För att planera och optimera denna process, tidigare studier har föreslagit en mängd olika tillvägagångssätt, som kan delas in i två huvudkategorier. Den första kategorin innebär målkonfiguration genom att dela upp systemets modulära arkitektur i olika uppsättningar av moduler, vilket kan förenkla omkonfigureringsprocessen. Dessa tillvägagångssätt kan underlätta utformningen av den slutliga konfigurationen för specifika uppgifter, ändå misslyckas de med att ta itu med den dynamiska omkonfigureringsprocessen.
Ett annat tillvägagångssätt för att optimera omkonfigurationen är att minimera antalet anslutningsändringar när systemet omvandlas till önskad form. Även om dessa omkonfigurationsplanerare syftar till att minska antalet anslutningsändringar, de kräver fortfarande någon form av frånkoppling och koppling mellan moduler i processen. Dessa anslutningsförändringar är tidskrävande, kan orsaka komplikationer i den övergripande transformationen och kan resultera i felinställning, leder till systemets mekaniska fel.
Att ta itu med begränsningarna med befintliga metoder, forskarteamet vid RRL introducerade en ny strategi för att planera omkonfigurationen av modulära robotsystem, som drar från processen att vika origami. Origami är den traditionella japanska konsten att vika platta pappersark till en mängd olika 3D-objekt eller former.
"Vår metod består av en energioptimal omkonfigurationsplanerare som genererar ett initialt 2D-monteringsmönster och en aktiveringssekvens av de modulära enheterna, båda resulterar i minimal energiförbrukning, " skrev forskarna i sin uppsats.
Det algoritmiska ramverket som forskarna tagit fram inkluderar två huvudkomponenter:en automatisk modelleringsalgoritm och en heuristisk algoritm. Den automatiska modelleringsalgoritmen genererar den kinematiska modellen och den dynamiska härledningen av robotaggregat, beräkna vridmomentförbrukningen för förvikningsmönster för fördefinierade vikningssekvenser och använda rörelseplanering för att beakta strukturens tjocklek. Den heuristiska algoritmen, å andra sidan, innehåller en optimal 2D-layoutplanerare följt av två vikningssekvensplanerare:en enhetlig aktiveringsplanerare för olika layouter och en optimal planerare inom en specifik layout.
Det nya tillvägagångssättet som utarbetats vid RRL tacklar effektivt det NP-kompletta problemet med energioptimal omkonfigurationsplanering i modulära robotar, generera energioptimala omkonfigurationsscheman för den initiala monteringen och vikningssekvensen av systemets moduler. Forskarna utvärderade sin strategi med hjälp av simuleringar på Mori, en modulär robotplattform, och nådde mycket lovande resultat.
"Vi visar effektiviteten av vår metod genom att tillämpa algoritmerna på Mori, en modulär origamirobot, i simulering, " skrev forskarna i sin uppsats. "Våra resultat visar att den heuristiska algoritmen ger omkonfigurationsscheman med hög kvalitet, jämfört med den automatiska modelleringsalgoritmen, samtidigt spara en avsevärd mängd beräkningstid och ansträngning."
© 2018 Science X Network