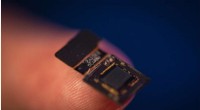
En robotsvärm. Roboten som valdes i denna studie var kiloboten. Upphovsman:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Hundratals små robotar kan arbeta i ett team för att skapa biologiinspirerade former utan en underliggande masterplan, enbart baserat på lokal kommunikation och rörelse. För att uppnå detta, forskare från EMBL, CRG och Bristol Robotics Laboratory introducerade de biologiska principerna för självorganisation för svärmrobotik. Resultaten har publicerats i Science Robotics .
"Vi visar att det är möjligt att tillämpa naturens begrepp om självorganisering på mänsklig teknik som robotar, " säger EMBL Barcelonas gruppledare James Sharpe. "Det är fascinerande eftersom tekniken är väldigt skör jämfört med den robusthet vi ser inom biologi. Om en komponent i en bilmotor går sönder, det resulterar vanligtvis i en icke-funktionell bil. Däremot när ett element i ett biologiskt system misslyckas, till exempel om en cell dör oväntat, det äventyrar inte hela systemet, och kommer vanligtvis att ersättas av en annan cell senare. Om vi kunde uppnå samma självorganisering och självreparation inom teknik, vi kan göra det mycket mer användbart än det är nu. "Sharpe ledde projektet - initierat vid Center for Genomic Regulation (CRG) med Sabine Hauert vid University of Bristol.
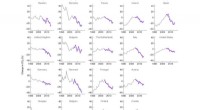
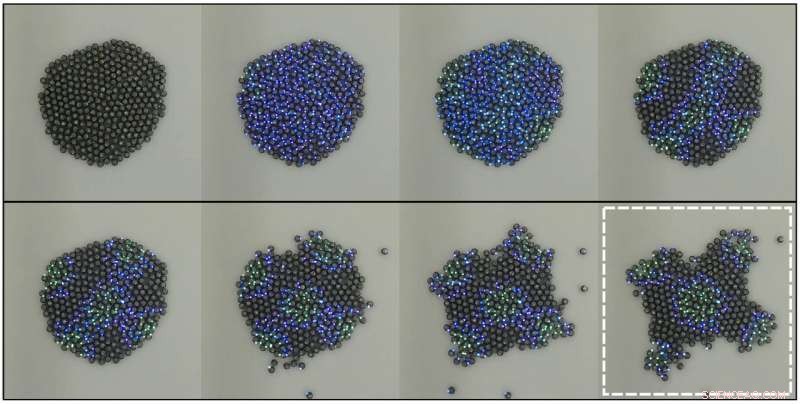
Formbildning som ses i robotsvärmarna
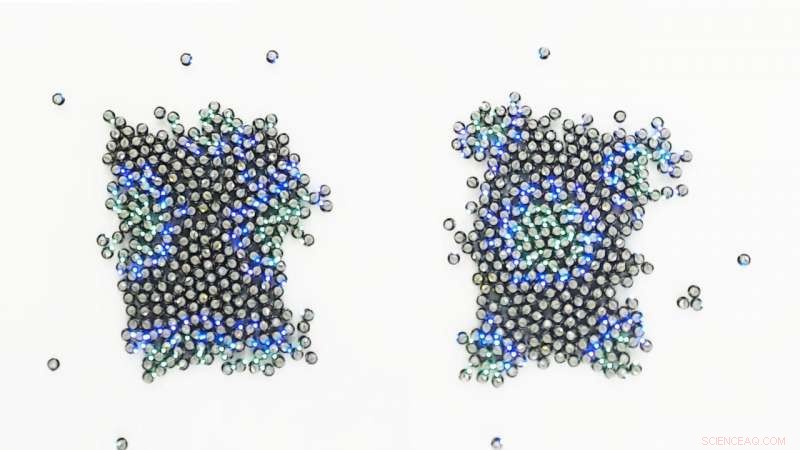
Kompletta experiment varade i genomsnitt i tre och en halv timme. Inspirerad av biologi, robotarna lagrar morfogen, virtuella molekyler som bär den mönstrande informationen. Färgerna signalerar de enskilda robotarnas morfogenkoncentration:grönt indikerar mycket höga morfogenvärden, blått och lila indikerar lägre värden, och ingen färg indikerar virtuell frånvaro av morfogen i roboten. Varje robots morfogenkoncentration sänds till närliggande robotar inom 10 centimeters intervall. Det övergripande mönstret av fläckar som uppstår driver omlokaliseringen av robotar för att växa utsprång som når ut från svärmen.
Uppkomsten av olika svärmmorfologier via ett Turing-diffusionsmönster. Upphovsman:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Turings regler
Den enda information som teamet installerade i robotarna i myntstorlek var grundläggande regler för hur man interagerar med grannar. Faktiskt, de programmerade specifikt robotarna i svärmen att agera på samma sätt som celler i en vävnad. Dessa "genetiska" regler efterliknar systemet som är ansvarigt för Turing-mönstren som observeras i naturen, som arrangemanget av fingrar på en hand eller fläckarna på en leopard. På det här sättet, projektet sammanför två av Alan Turings fascinationer:datavetenskap och mönsterbildning i biologi.
Robotarna är beroende av infraröda meddelanden för att kommunicera med grannar inom ett räckvidd på 10 centimeter. Detta gör att robotarna liknar biologiska celler, eftersom de också bara kan kommunicera direkt med andra celler fysiskt nära dem.
Svärmen bildar olika former genom att flytta robotar från områden med låg morfogenkoncentration till områden med hög morfogenkoncentration - kallade ”Turing -fläckar, " vilket leder till tillväxten av utsprång som når ut från svärmen. "Det är vackert att se svärmen växa till former, det ser ganska organiskt ut. Det som är fascinerande är att det inte finns någon masterplan, dessa former uppstår som ett resultat av enkla interaktioner mellan robotarna. Detta skiljer sig från tidigare arbete där formerna ofta var fördefinierade, säger Sabine Hauert.

Robotarna som användes under experimenten. Formen på just denna svärm är en handgjord illustration av tekniken. Kredit:AAAS
Arbetar med stora robotsvärmar
Det är omöjligt att studera svärmbeteende med bara ett par robotar. Teamet använde minst 300 i de flesta experiment. Att arbeta med hundratals små robotar är en utmaning i sig. De kunde göra detta tack vare en speciell installation som gör det enkelt att stoppa experiment, och alla robotar programmerades om på en gång med hjälp av ljus. Forskarna genomförde över 20 experiment med stora svärmar, med varje experiment som tar cirka tre och en halv timme.
Vidare, precis som i biologin, saker gick ofta fel. Robotar fastnade, eller släpade bort från svärmen i fel riktning. "Det är den typen av saker som inte händer i simuleringar, men bara när du gör experiment i verkligheten, säger Ivica Slavkov, som delar första författarskapet av tidningen med Daniel Carrillo-Zapata.
Alla dessa detaljer gjorde projektet utmanande. Den tidiga delen av projektet gjordes i datorsimuleringar, och det tog laget ungefär tre år innan den riktiga robotsvärmen gjorde sin första form. Men robotarnas begränsningar tvingade också teamet att ta fram smarta, robusta mekanismer för att orkestrera svärmsmönstret. Genom att ta inspiration från formbildning i biologin, teamet kunde visa att deras robotformer kunde anpassa sig till skador och självreparation. Svärmens storskaliga formbildning är mycket mer tillförlitlig än var och en av de små robotarna; helheten är större än summan av delarna.
Medan forskarna hämtade inspiration från naturen för att odla svärmformerna, Målet är i slutändan att skapa stora robotsvärmar för verkliga tillämpningar. Föreställ dig hundratals eller tusentals små robotar som ändrar formation för att anpassa sig till en katastrofmiljö efter en jordbävning eller brand, eller skulptera sig till en dynamisk 3D-struktur, till exempel en tillfällig bro som automatiskt kan justera dess storlek och form för att passa alla byggnader eller terräng. "Eftersom vi tog inspiration från biologisk formbildning, som är känt för att vara självorganiserad och robust mot misslyckande, sådana svärmar kunde fortfarande fortsätta arbeta även om vissa robotar skadades, säger Daniel Carrillo-Zapata. Men det är fortfarande en lång väg kvar att gå, innan vi ser sådana svärmar utanför laboratoriet.