Denna figur visar en sjuaxlad hydraulisk robotarm som bryter betongplattor, var 30 mm tjock. Detta är en prototyp för jämförelse med en fyrbent robot som också utvecklas i detta projekt av Waseda University, Meiji University, och andra, tillverkas i ungefär samma storlek. Den består av sju av de nya hydraulmotorerna. Kredit:Suzumori Laboratory
Forskare vid Tokyo Institute of Technology (Tokyo Tech) har utvecklat ett hydrauliskt manöverdon som gör det möjligt för tuffa robotar att arbeta på katastrofplatser och andra tuffa miljöer. Tokyo Tech Venture H-MUSCLE Corporation grundades för att söka applikationer för ställdonet, och leverans av produktprover börjar i februari 2019.
Majoriteten av dagens robotar drivs av elmotorer, men hydrauliska ställdon, med sin höga effekt och slagtålighet, skulle vara väl lämpad för robotar som arbetar i tuffa miljöer. Dock, typiska hydrauliska ställdon är utvecklade för industrimaskiner, som makt spadar, och är för stora och tunga för att användas i robotar; de kan inte heller ge mjuk rörelse eller kraftkontroll.
Tokyo Tech School of Engineering professor Koichi Suzumori och kollegor utvecklade ett hydrauliskt ställdon för att lösa dessa problem. Ställdonet erbjuder kraftigt ökad kraft och stöttålighet jämfört med konventionella elmotorer. Det ger också en mindre storlek, högre effekt (kraft-till-massa-förhållande), och mjukare kontroll jämfört med konventionella hydrauliska ställdon. Ger hög effekt, varaktighet, och utmärkt kontroll, ställdonet kommer att tillåta robotar att arbeta i de tuffaste miljöer och utföra tufft arbete med en mild beröring.
Detta hydrauliska ställdon är resultatet av Tough Robotics Challenge, organiserat av Impulsing Paradigm Change through Disruptive Technologies Program (ImPACT) från Japans regeringskontor. Tokyo Tech; JPN Co., Ltd.; Bridgestone Corporation; och KYB Corporation; tillsammans med andra universitet och företag som sysslar med hydraulisk utrustning, har deltagit i utvecklingen av det hydrauliska ställdonet för tuffa robotar sedan 2014. För att främja användningen av tekniken, H-MUSCLE kommer att skicka prover av sina hydraulcylindrar och hydraulmotorer till inhemska tillverkare, utöka sitt utbud av ställdon för framtida försäljning, och utforska ytterligare tillämpningar.
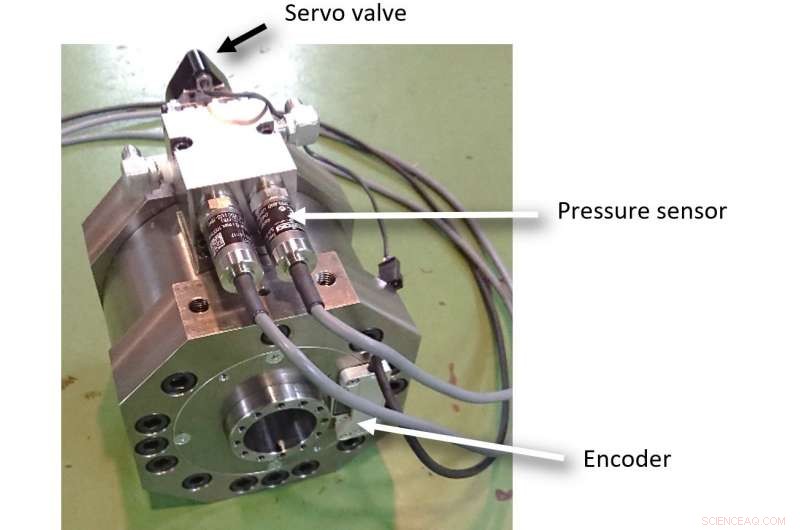
En liten, lättvikt, smidigt glidande motor. Kredit:Suzumori -laboratoriet
Bakgrund
Impact Tough Robotics Challenge (2014-2018, Programledare:Satoshi Tadokoro, Professor, Tohoku University) har bedrivit forskning i syfte att skapa robotar för tuff drift, även på extrema katastrofplatser. Som en del av detta projekt, hydrauliska ställdon specifikt för robotar och deras robotapplikation var satt som ett forskningstema. Koichi Suzumori (robotik, actuator engineering) vid Tokyo Tech var ledare för gruppen med deltagare Tokyo Tech; Okayama University; Ritsumeikan universitet, JPN Co., Ltd.; Bridgestone Corporation; och KYB Corporation. I samarbete med många andra företag med högt specialiserad teknik, de lyckades utveckla ett ställdon för hydrauliska robotar som är litet, lättvikt, hög effekt, och smidigt glidande, något som inte finns i befintliga produkter.
Meriter av små, lättvikt, slätglidande ställdon
Det nya hydrauliska ställdonet erbjuder följande framsteg jämfört med befintliga hydrauliska ställdon.
ImPACT har byggt flera tuffa robotprototyper för att testa potentiella applikationer för det hydrauliska ställdonet.
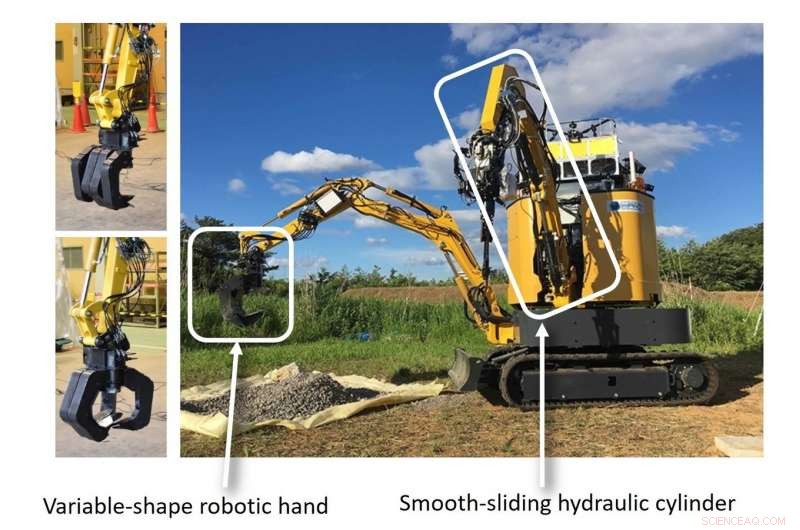
En byggrobot som utvecklas av Komatsu, Osaka University, och andra. Den minsta av de två armarna drivs av mjukt glidande cylindrar som utvecklats i detta program, bidrar till dess förmåga att göra fina manipulationer. Änden på den andra armen är utrustad med en hydraulisk hand med det nya hydrauliska ställdonet. Med fyra fingrar, den kan användas i spadeläge eller handläge efter behov. I handläge, den kan greppa föremål av olika former och kontrollera greppets kraft. Upphovsman:Komatsu, Osaka University, Tokyo Institute of Technology