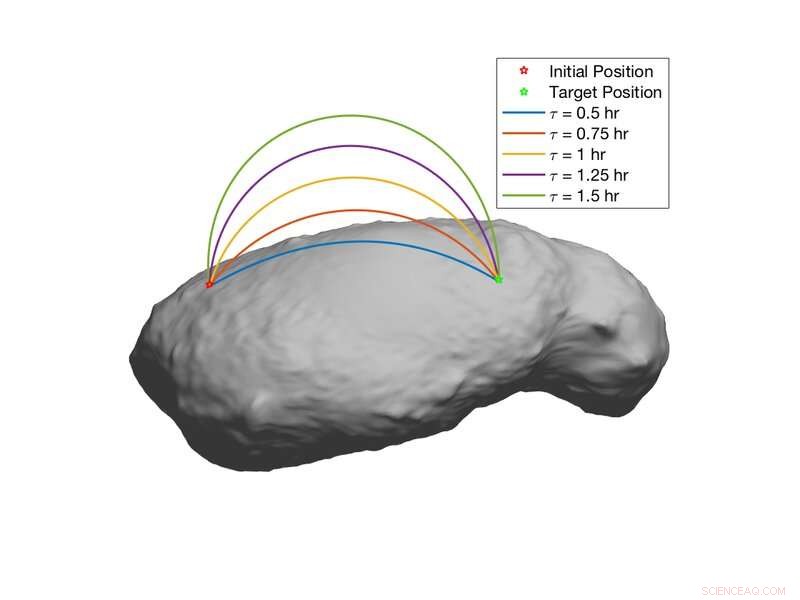
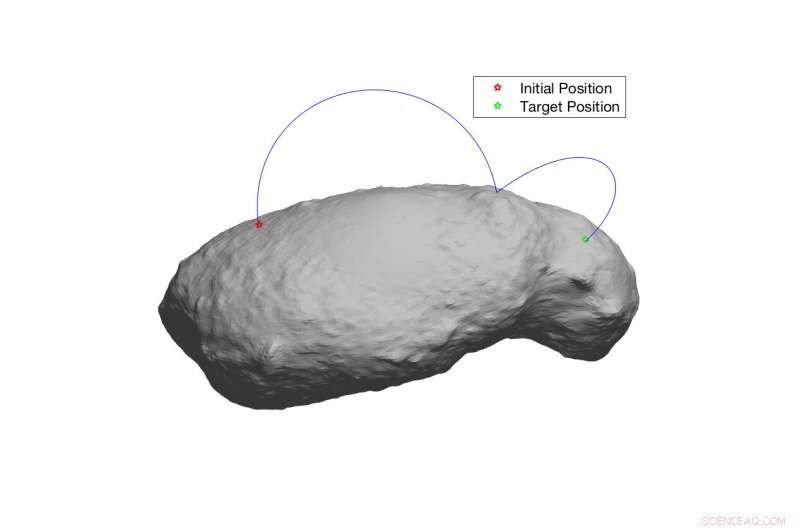
Hoppningsbanor från den ursprungliga platsen till en målplats på ytan av Itokawa. Kredit:Kalita &Thangavelautham.
Asteroider är små, steniga kroppar som kretsar runt solen som är för små för att kallas planeter. Det finns miljontals asteroider i solsystemet, varierar i storlek, form och sammansättning. Utforskningen av asteroider kan hjälpa till att avslöja fascinerande information om solsystemets ursprung, av planeten jorden, och livet självt.
Asteroider kan också fungera som strategiska platser för planetvetenskap, resursbrytning, kommunikationsreläer eller planetförsvar. Än så länge, dock, att utforska asteroidernas ytor har visat sig vara mycket utmanande på grund av deras låga och mycket icke-linjära gravitationsfält.
Senaste asteroiduppdrag, t.ex. Hayabusa II och OSIRIS-Rex var bara flyg-förbi eller touch-and-go-operationer. Forskare har därför försökt utveckla teknologi som skulle möjliggöra utforskning av asteroidytor, till exempel, använda in situ-instrument för att analysera deras sammansättning och material under ytan.
Hopprobotar kan vara särskilt användbara för att utforska sådana ytor, eftersom rörlighet genom ballistisk hoppning har flera fördelar i närvaro av oregelbundna gravitationsfält. Dessa typer av robotar kan korsa stora avstånd över ojämn terräng, med begränsad energiförbrukning. Ett team av forskare vid University of Arizona har nyligen utvecklat ballistisk hoppdynamik och ett nytt tillvägagångssätt för rörelseplanering på asteroidytor.
Självlokalisering med hjälp av 3D-punktmolnskanningsmatchning. Kredit:Kalita &Thangavelautham.
"Till skillnad från jorden, asteroidgravitationen är låg, eftersom sådana hoppande rovers är mer lämpade, eftersom de kan korsa stora avstånd över godtyckligt ojämn terräng med utgifter för lite energi, " Himangshu Kalita, en av forskarna som genomförde studien, berättade för TechXplore. "Dock, deras oregelbundna form resulterar i ett mycket oregelbundet gravitationsfält, vilket gör hoppningen mycket osäker. Således, Det krävs en sekventiell arkitektur för hoppande roverautonomi som kan planera i förväg innan något hopp utförs och samtidigt lokalisera sig själv."
Tillvägagångssättet som utarbetats av Kalita och hans kollega Jekan Thanga beräknar hastigheten som krävs för att fånga upp ett mål och lokaliserar sedan den hoppande roboten. För att lokalisera roboten, forskarna använde metoder för ställningsuppskattning baserade på successiv skanningsmatchning med en 3D-laserskanner.
Informationen som samlas in används sedan för att planera hopprobotens rörelse på målasteroidens yta. Roboten skulle behöva utföra flera hopp för att nå en önskad plats på asteroiden, samtidigt som man undviker hinder.
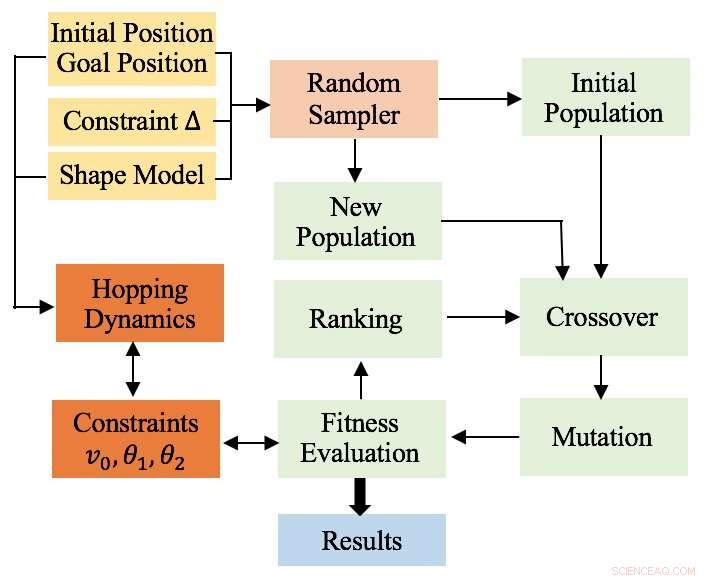
Schematisk över den optimerade vägplaneraren med hjälp av Evolutionary Algorithm. Kredit:Kalita &Thangavelautham.
"Rörelseplaneringsarkitekturen som diskuteras i tidningen kan hitta nära optimala banor för en hoppande rover att nå en målplats från sin ursprungliga plats på ytan av en asteroid med oregelbundna gravitationsfält, " Kalita förklarade. "Vårt tillvägagångssätt använder en high-fidelity dynamikmodell för att utföra trial and error utvärdering i simulering av kandidatmanövrar för att bestämma deras lämplighet. Trial and error-utvärderingen tar hänsyn till risker, belöningar och lokala osäkerheter."
Många asteroider är rika på resurser som vatten, kolföreningar, järn- och platinametaller. Vissa asteroider innehåller också rester av befintliga planeter och kan därmed fungera som "tidskapslar", tillhandahåller orörda uppgifter om den tidiga geologin och geohistorien för sådana planeter. Att utforska dessa asteroider kan ge värdefull insikt om ursprunget till solsystemet och planeterna som det innehåller. I framtiden, tillvägagångssättet från Thanga och Kalita kan bana väg för utforskning av asteroidytor, leder till intressanta observationer och upptäckter.
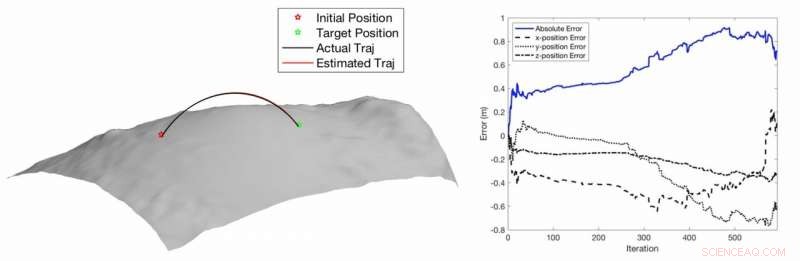
Optimal bana genererad av vägplaneraren för att nå en målplats. Kredit:Kalita &Thangavelautham.
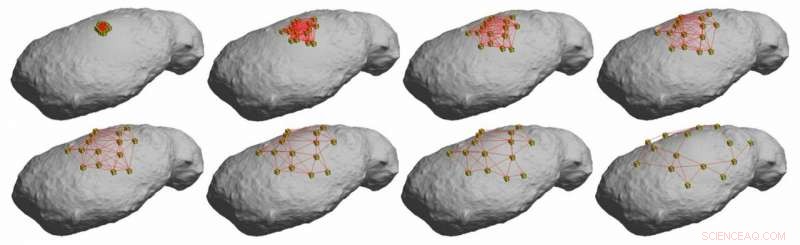
Flera rovers utforskar ytan på asteroiden Itokawa i samarbete. Kredit:Kalita &Thangavelautham.
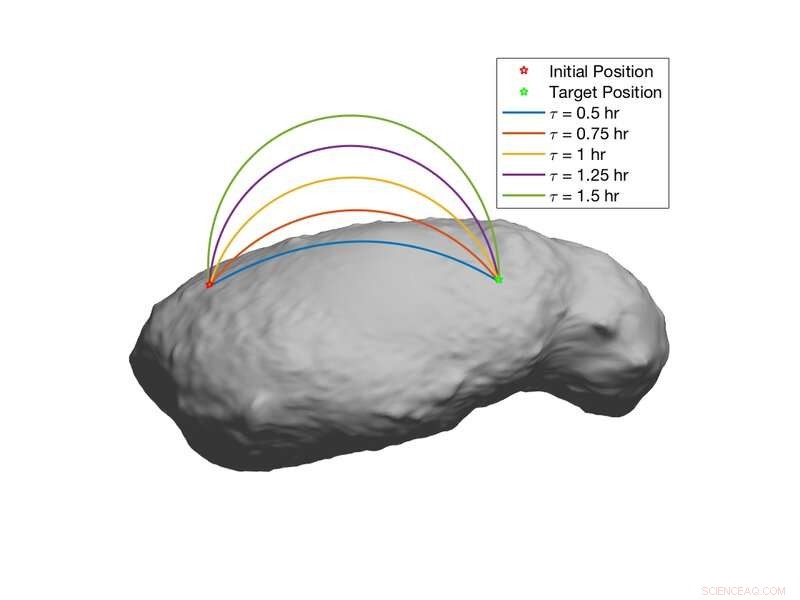
Hoppningsbanor från den ursprungliga platsen till en målplats på ytan av Itokawa. Kredit:Kalita &Thangavelautham.
"Flyby och långdistansobservation av asteroider är otillräcklig för att avgöra vad som finns under det översta lagret av asteroider, " sa Thanga. "Vårt tillvägagångssätt, som innebär att utföra ballistiskt hopp för ytutforskning av asteroider, kan svara på dessa frågor. Dessutom, de rovers som hittills har utplacerats på asteroidytor är beroende av ett moderskepp för lokalisering, men deras möte i sällsynta fall. Våra simuleringar visar att genom att använda en 3-D kartläggningssensor ombord, roverna kan utföra moderskeppsoberoende självlokalisering vilket är en föregångare för roverautonomi."
Tillvägagångssättet som utvecklats av Thanga och Kalita är utformat för att effektivt planera rörelsen av en hoppande robot över långa avstånd, på asteroidytor med oregelbundna gravitationsfält. Samma tillvägagångssätt kan tillämpas på flera koordinerade robotar som samtidigt utforskar en given asteroids yta. Forskarna har också utökat sin metod för att kunna beräkna flera optimala banor, vilket skulle tillåta en robot att nå ett önskat mål samtidigt som den besöker flera waypoints.
"Vi håller nu på att utveckla prototyper för miniatyriserad hopping rover som kommer att använda sublimatbaserade drivmedel för hoppning, " sa Kalita. "Med simulerade oregelbundna gravitationsfält, vi kommer att kunna testa vårt tillvägagångssätt för att hitta hoppbanor."
© 2019 Science X Network