Forskare vid University of Washington har utvecklat ett robotsystem som kan mata människor som behöver någon som hjälper dem att äta. Här, en volontär visar hur systemet fungerar. Upphovsman:Eric Johnson/University of Washington
Omkring 1 miljon vuxna i USA behöver någon som hjälper dem att äta, enligt folkräkningsdata från 2010. Det är en tidskrävande och ofta besvärlig uppgift, en till stor del gjort av nödvändighet snarare än val.
Forskare vid University of Washington arbetar med ett robotsystem som kan hjälpa till att göra det enklare. Efter att ha identifierat olika livsmedel på en tallrik, roboten kan planera hur man använder en gaffel för att plocka upp och leverera det önskade bettet till en persons mun.
Teamet publicerade sina resultat i en serie artiklar:En publicerades nyligen i IEEE Robotics and Automation Letters , medan den andra kommer att presenteras 13 mars på ACM/IEEE International Conference on Human-Robot Interaction i Sydkorea.
"Att vara beroende av en vårdgivare för att mata varje tugga varje dag tar bort en persons känsla av självständighet, " sa motsvarande författare Siddhartha Srinivasa, den Boeing-begåvade professorn vid UW:s Paul G. Allen School of Computer Science &Engineering. "Vårt mål med det här projektet är att ge människor lite mer kontroll över sina liv."
Tanken var att utveckla ett autonomt matningssystem som skulle fästas på människors rullstolar och mata folk vad de ville äta.
"När vi startade projektet insåg vi:Det finns så många sätt att människor kan äta en bit mat beroende på dess storlek, form eller konsistens. Hur börjar vi?" sa medförfattaren Tapomayukh Bhattacharjee, en postdoktoral forskarassistent vid Allen School. "Så vi satte upp ett experiment för att se hur människor äter vanliga livsmedel som vindruvor och morötter."
Forskarna arrangerade tallrikar med ett dussintal olika sorters mat, allt i konsistens från hårda morötter till mjuka bananer. Tallrikarna innehöll också mat som tomater och vindruvor, som har en tuff hud och mjuk insida. Sedan gav teamet volontärer en gaffel och bad dem att plocka upp olika bitar av mat och mata dem till en skyltdocka. Gaffeln innehöll en sensor för att mäta hur mycket kraft folk använde när de hämtade mat.
Volontärerna använde olika strategier för att hämta mat med olika konsistenser. Till exempel, människor stack mjuka föremål som bananer i vinkel för att hålla dem från att glida av gaffeln. För saker som morötter och druvor, volontärerna tenderade att använda vickande rörelser för att öka kraften och spjuta varje tugga.
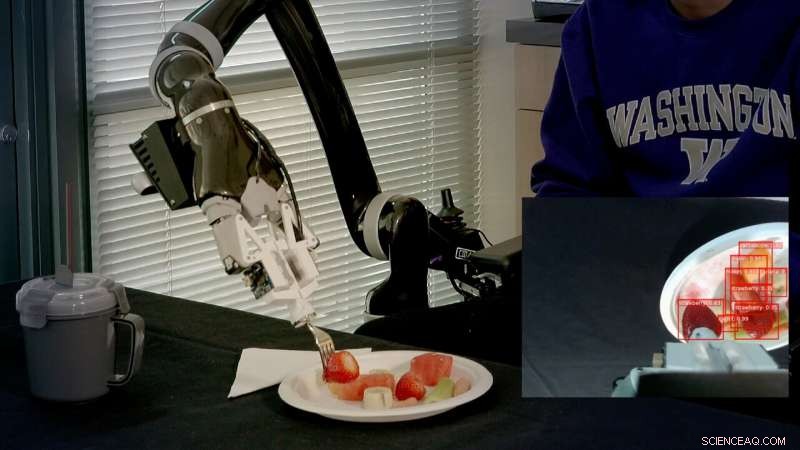
Algoritmen för objektdetektering, kallas RetinaNet, skannar plattan, identifierar mattyperna på den och placerar en ram runt varje objekt. Kredit:Eric Johnson/University of Washington
"Folk verkade använda olika strategier inte bara baserat på storleken och formen på maten utan också hur hård eller mjuk den är. Men behöver vi verkligen göra det?" sa Bhattacharjee. "Vi bestämde oss för att göra ett experiment med roboten där vi hade den spettmat tills gaffeln nådde ett visst djup inuti, oavsett typ av mat."
Roboten använde samma kraft-och-spettstrategi för att försöka plocka upp alla bitar av mat, oavsett deras konsistens. Den kunde plocka upp hård mat, men det kämpade med mjuka livsmedel och de med tuffa skinn och mjuka insidor. Så robotar, som människor, måste justera hur mycket kraft och vinkel de använder för att plocka upp olika sorters mat.
Teamet noterade också att handlingarna att plocka upp en bit mat och mata den till någon inte är oberoende av varandra. Volontärer orienterade ofta specifikt en bit mat på gaffeln så att den lätt kunde ätas.
"Du kan plocka upp en morotspinne genom att sticka den i mitten av pinnen, men det kommer att vara svårt för en person att äta, " sa Bhattacharjee. "Å andra sidan, om du tar upp den i en av ändarna och sedan lutar moroten mot någons mun, det är lättare att ta en tugga."
Att utforma en spett- och utfodringsstrategi som förändras baserat på maten, forskarna kombinerade två olika algoritmer. Först använde de en objektdetekteringsalgoritm som heter RetinaNet, som skannar plattan, identifierar typerna av mat på den och placerar en ram runt varje föremål.
Sedan utvecklade de SPNet, en algoritm som undersöker typen av mat i en specifik ram och talar om för roboten det bästa sättet att plocka upp maten. Till exempel, SPNet säger åt roboten att spett en jordgubbe eller en skiva banan i mitten, och spjut morötter i en av de två ändarna.
Teamet lät roboten plocka upp bitar av mat och mata dem till volontärer med hjälp av SPNet eller en mer enhetlig strategi:ett tillvägagångssätt som spetsade mitten av varje matvara oavsett vad det var. SPNets olika strategier överträffade eller presterade på samma sätt som den enhetliga metoden för all mat.
"Många tekniska utmaningar är inte kräsna när det gäller sina lösningar, men denna forskning är mycket intimt kopplad till människor, " sa Srinivasa. "Om vi inte tar hänsyn till hur lätt det är för en person att ta en tugga, då kanske folk inte kan använda vårt system. Det finns ett universum av matslag där ute, så vår största utmaning är att utveckla strategier som kan hantera dem alla."
Teamet arbetar för närvarande med Taskar Center for Accessible Technology för att få feedback från vårdgivare och patienter i stödboende om hur man kan förbättra systemet för att matcha människors behov.
"I slutändan är vårt mål att vår robot ska hjälpa människor att äta sin lunch eller middag på egen hand, ", sade Srinivasa. "Men poängen är inte att ersätta vårdgivare:Vi vill bemyndiga dem. Med en robot som hjälp, vårdgivaren kan sätta upp tallriken, och sedan göra något annat medan personen äter."