Upphovsman:Massachusetts Institute of Technology
För 50 år sedan, den första industriella robotarmen som heter Unimate samlade en enkel frukost med rostat bröd, kaffe, och champagne. Även om det kan ha sett ut som en sömlös prestation, varje rörelse och placering kodades med noggrann övervägande.
Även med dagens mer intelligenta och adaptiva robotar, denna uppgift är fortfarande svår för maskiner med styva händer. De tenderar att fungera endast i strukturerade miljöer med fördefinierade former och platser, och kan vanligtvis inte hantera osäkerheter i placering eller form.
Under de senaste åren har fastän, robotister har tagit tag i detta problem genom att göra fingrar av mjuka, flexibel, material som gummi. Denna smidighet låter dessa mjuka robotar plocka upp allt från druvor till lådor och tomma vattenflaskor, men de kan fortfarande inte hantera stora eller tunga föremål.
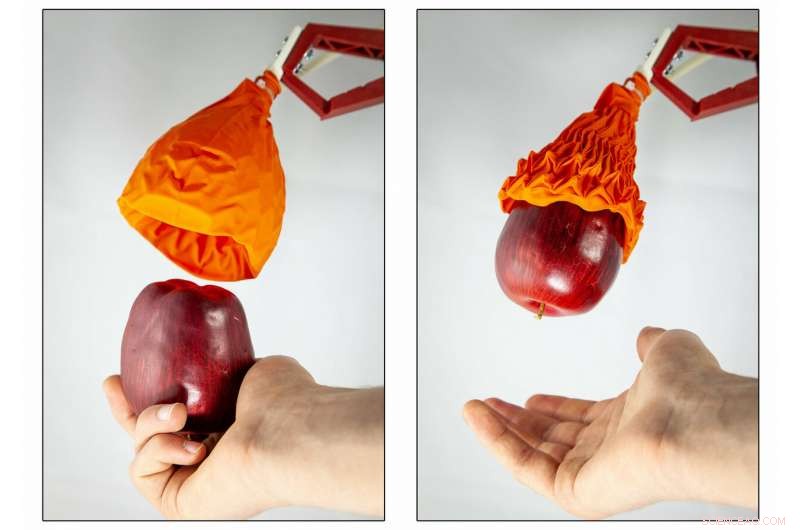
För att ge dessa mjuka robotar lite hand, forskare från MIT och Harvard har utvecklat en ny gripare som är både mjuk och stark:en konformad origamistruktur som faller in på objekt, ungefär som en Venus flytrap, att plocka upp föremål som är så mycket som 100 gånger dess vikt. Denna rörelse låter griparen greppa ett mycket bredare utbud av föremål - till exempel soppburkar, hammare, vinglas, drönare, och till och med en enda broccolifloret.
"En av mina månskott är att skapa en robot som automatiskt kan packa matvaror åt dig, "säger MIT -professor Daniela Rus, chef för MIT:s datavetenskap och artificiell intelligenslaboratorium (CSAIL), och en av seniorförfattarna till en ny uppsats om projektet.
"Tidigare tillvägagångssätt för förpackningsproblemet kunde bara hantera mycket begränsade klasser av objekt - föremål som är mycket lätta eller föremål som överensstämmer med former som lådor och cylindrar, men med Magic Ball gripsystem har vi visat att vi kan utföra plock-och-plats-uppgifter för en mängd olika föremål, allt från vinflaskor till broccoli, vindruvor och ägg, "säger Rus." Med andra ord, föremål som är tunga och föremål som är lätta. Föremål som är känsliga, eller robust, eller som har regelbundna eller fria former. "
Projektet är ett av flera under de senaste åren som har forskare som tänker utanför boxen med robotdesign. Bollformade gripare, till exempel, kan hantera ett större antal objekt än fingrar, men har fortfarande frågan om begränsade vinklar. Mjukare robotfingrar använder vanligtvis tryckluft, men är inte tillräckligt starka för att plocka upp tyngre föremål.
Strukturen för denna nya gripare, under tiden, tar en helt annan form. Konformad, ihålig, och vakuumdriven, enheten inspirerades av "origami magic ball" och kan omsluta ett helt föremål och lyckas plocka upp det.
Griparen har tre delar:den origami-baserade skelettstrukturen, den lufttäta huden för att omsluta strukturen, och kontakten. Teamet skapade det med hjälp av en mekanisk gummimögel och en speciell värmekrympande plast som fälls själv vid höga temperaturer.
Den magiska bollens skelett är täckt av antingen en gummiballong eller ett tunt tygark, inte till skillnad från teamets tidigare forskning om vätskedrivna origami-inspirerade konstgjorda muskler (FOAM), som bestod av en lufttät hud som omger ett vikbart skelett och vätska.
Teamet använde griparen med en standardrobot för att testa dess styrka på olika föremål. Griparen kunde greppa och lyfta föremål 70 procent av dess diameter, som gjorde det möjligt att plocka upp och hålla en mängd olika mjuka livsmedel utan att orsaka skada. Det kan också plocka upp flaskor som väger över fyra kilo.
"Företag som Amazon och JD vill kunna hämta ett bredare utbud av känsliga eller oregelbundet formade föremål, men kan inte med fingerbaserade och sugkoppskopplare, "säger Shuguang Li, en gemensam postdoc vid MIT CSAIL och Harvards John A. Paulson School of Engineering and Applied Sciences (SEAS). "Sugkoppar kan inte plocka upp något med hål-och de skulle behöva något mycket starkare än en mjukfingerbaserad gripare."
Roboten fungerar för närvarande bäst med cylindriska föremål som flaskor eller burkar, som någon gång skulle kunna göra det till en tillgång för produktionslinjer i fabriker. Inte överraskande, griparens form gör det svårare att greppa något platt, som en smörgås eller bok.
"En av nyckelfunktionerna i detta tillvägagångssätt för manipulatorkonstruktion är dess enkelhet, "säger Robert Wood, medförfattare och professor vid Harvards tekniska högskola och Wyss Institute for Biologically Inspired Engineering. "De material och tillverkningsstrategier som används gör att vi snabbt kan prototypa nya gripare, anpassas till objekt eller miljö efter behov. "
I framtiden, laget hoppas kunna försöka lösa problemet med vinkel och orientering genom att lägga till datorsyn som skulle låta griparen "se", och gör det möjligt att ta tag i specifika delar av föremål.
"Detta är en mycket smart enhet som använder kraften i 3D-utskrift, ett vakuum, och mjuk robotik för att närma sig problemet med att greppa på ett helt nytt sätt, "säger Michael Wehner, en biträdande professor i robotik vid UC-Santa Cruz som inte var inblandad i projektet. "Under de kommande åren, Jag kunde tänka mig att se mjuka robotar som är skonsamma och skickliga nog att plocka en ros, men ändå tillräckligt stark för att säkert lyfta en sjukhuspatient. "