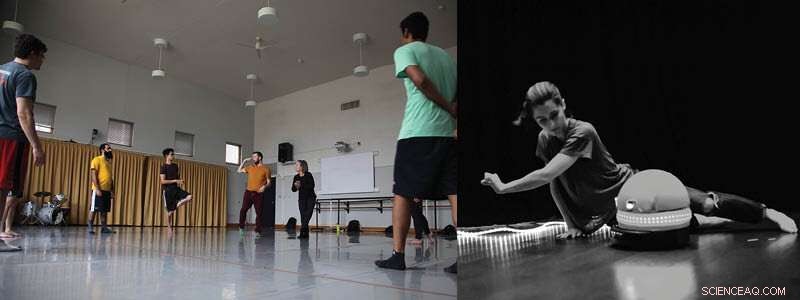
Bild till vänster:Förkroppsligad praktik i RAD-labbet ledd av Riley Watts (mitten); foto av Catie Cuan. Bild till höger:konstnärlig praktik i RAD Lab genom en föreställning av "Time to Compile" vid Brown University. Kredit:Keira Heu-Jwyn Chang.
University of Illinois-forskaren Amy LaViers har introducerat en ny synvinkel för att observera robotkapacitet i sin artikel, "Räknar av mekaniska, Externa konfigurationer jämfört med Computational, Interna konfigurationer i naturliga och artificiella system, " publiceras idag i PLOS ETT , en ledande tvärvetenskaplig forskningstidskrift.
LaViers leder Robotics, Automatisering, och Dance (RAD) Lab, som specialiserat sig på utveckling av uttrycksfulla robotsystem. Vanligtvis, robotar syftar till att replikera någon form av naturlig rörelse eller handling. I branschmiljöer som tillverkning eller lagerinventering, robotar presterar vanligtvis mycket bättre med högre noggrannhet, precision, och lägre kostnad över tid. Men i mer dynamiska situationer naturliga system är mer benägna att prestera bättre än en robot. Utförande av kontrollerade uppgifter, till exempel, mycket av det som syns på ett lager, kan lätt kvantifieras, men när det kommer till de mer komplexa situationerna har det inte funnits ett bra sätt att göra det. LaViers papper introducerar en förenklad räknemodell som ger ett numeriskt perspektiv för att jämföra robotars och naturliga varelsers uttrycksförmåga. Detta är ett ämne som utforskas i RAD Lab genom tvärvetenskapligt samarbete med konstnärer och somatisk praktik.
I datoranvändning finns det många variabler som spelar in i kraften hos en enhet, men ett vanligt sätt att modellera det använder antalet transistorer som enheten har. Över tid, antalet transistorer har ökat och datorkraften har ökat, en trend som ofta kallas Moores lag. En parallell kan dras till naturliga system mellan transistorer som är "på" och "av" och en förenklad modell av neuroner:"avfyrar" och "avfyrar inte." Ett sådant transistorantal ger en statisk flaskhals för datorers beräkningskapacitet, ignorerar dynamiska aspekter av processorhastighet, till exempel. LaViers märkte att en liknande räkning av statiska externa konfigurationer av robotar kunde avslöja trender i robotkapacitet. Dessutom, hon kopplade beräkning och mekanisering i en robot till interna och externa tillståndsförändringar, respektive, i en naturlig organism. Efter att ha gjort dessa jämförelser, LaViers kan direkt jämföra hur uttrycksfulla robotar är med naturliga organismer som visas i plotten nedan.
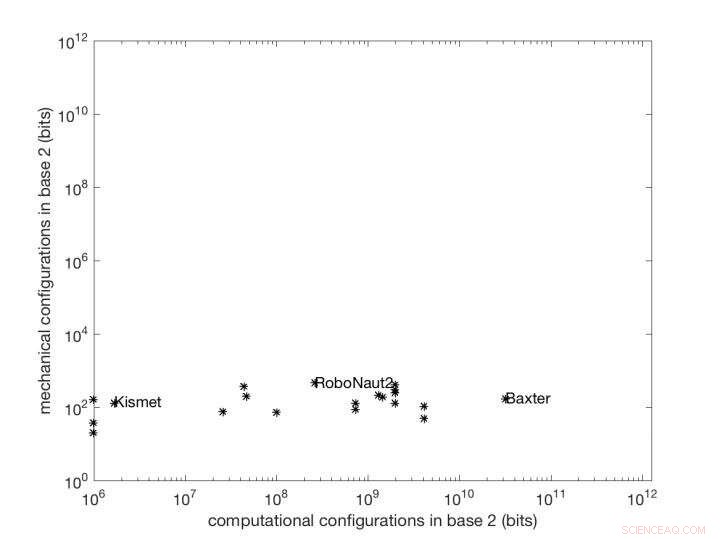
Handling från LaViers nypublicerade arbete:en jämförelse av förändringen i robotars inre vs externa komplexitet under de senaste 15 åren. Upphovsman:University of Illinois Robotics, Automation och dans (RAD) Lab
Hennes uppsats fokuserar på två modeller av en mikroskopisk mask (C. Elegans) och flera partiella organismanalyser samt analyser av en mängd välkända moderna robotar. En graf över LaViers resultat visar att, använder hennes metod, robotarna presterar mestadels mellan de två modellerna av masken för hur uttrycksfulla de är. Det är, en lämplig naturlig korrelation för uttrycksförmågan hos befintliga robotsystem kan vara denna lilla mask. Jämförelserna är inte perfekta, men de ger en förenkling av ett komplext problem för att förstå den större bilden – hur mycket framsteg som kan göras inom robotiks område i dynamiska situationer.
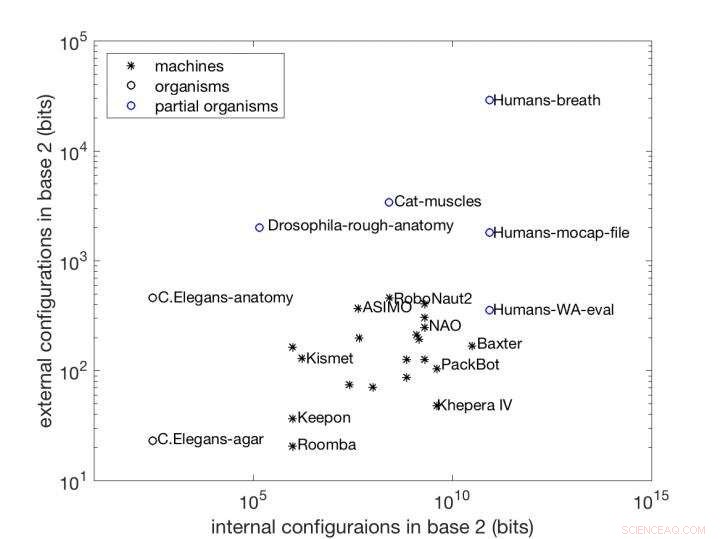
En jämförelse av samma grupp av robotar med naturliga system. Se publikationen för detaljer. Kredit:University of Illinois Robotics, Automatisering, och Dance (RAD) Lab
Inom robotik, Naturens fördelar förbises ibland. LaViers arbete kontextualiserar de framsteg som robotiker gjort under åren. Robotar har blivit mycket mer avancerade, men när det kommer till sann imitation av naturen finns det fortfarande mycket att göra. Den banbrytande aspekten av hennes nuvarande arbete är att just denna räknemodell inte har använts tidigare inom robotik.
"Vad jag är stolt över med denna tidning är att trenderna som avslöjas är lite chockerande för människor - och det har tagit lång tid att bli publicerad på grund av det, ", sa LaViers. "Recensenterna på denna plats var oerhört hjälpsamma för att göra tidningen starkare. I slutet, arbetet pekar förhoppningsvis på ett sätt att tänka på artificiella kontra naturliga system som kan hjälpa oss att förbättra fel och robusthet hos maskiner i dynamiska miljöer. Det är riktningen för framtida arbete."